Ogólny wzór na liczenie tensorów.


































ASJOMATY DZIAŁAŃ NA WEKTORACH




Podałem błędny wynik powinno być 12,04. Przepraszam za błąd.























































































.

















Rzut ukośny z oporem powietrza. Krzywa balistyczna








































http://jakpowstajfraktale.blogspot.com/




W tym celu równanie








Bardzo potężnym narzędziem całkowania jest metoda całkowania przez podstawienie




























Powyższy wzór wyprowadziliśmy błędnie. Oto poprawne rozwiązanie
Pole płata - układ kartezjański

Zauważymy, że Modół tego pola N jest równy
N = (Zx^2+Zy^2+1)^(0,5)
a delta s = N*delta(G)
gdzie delta(G) = d(x)*d(y) i jest elementarną powierzchnią. Jedynka we wzorze występuje dlatego, gdyż w kierunku Zx mamy wersor jednostkowy, liczymy pole nie objętość.
Iloczyn tego modułu N razy delta (G) = delta(S), a całka podwójna po d(x) i d(y) da pole powierzchni.


















Trzeci układ to układ cylindryczny. wzory przjścia z x na r i fi wyglądają następująco.





















http://jakpowstajfraktale.blogspot.com/
Wstęp
Kto
dopiero zaczyna naukę matematyki, lub ma poważne trudności ze
zrozumieniem tego bloga,dobrze trafił. Żeby módz żąglować
wzorami, potrzebne są pewne aksjomaty, co w przełożeniu na nasze,
oznacza podstawy, których nie trzeba udowadniać, które po prostu
są gdyż taka jest natura rzeczy. Takich podstaw nie jest dużo, w
porównaniu do korzyści jakie odniesiemy z ich znajomości, opłaca
się włożyć co prawda nie mały wysiłek w ich naukę. Proponujemy
wykonać dużo działań na tych podstawach, tak by zapadły w pamięć
i pod świadomość, dopiero później można ruszyć dalej.
Rozwój
czakr ziemskich powinien iść w parze z rozwojem czakr duchowych, i
dla nich istnieją podstawowe aksjomaty, które należy w tym
przypadku zrozumieć. Dlatego polecamy na wstępie przeczytać też
poniższy artykuł
Prawa
aksjomatyczne to prawa, które niepodlegają dowodzeniu. Wobec tego
prawa te należy nauczyć się na pamięć. Mówiąc dosadnie wkuć
je tak by umieć w nocy o północy, by zapadły w pod świadomość.
Bez zapamiętania tych aksjomatów droga do matematyki i innych
przedmiotów ścisłych jest zamknięta. Do kompletu należy jeszcze
zapamiętać wzory na upraszczanie skomplikowanych funkcji, które
znajdziecie tutaj
i
można zgłębiać tajniki matematyki wyższej.
Podstawowy
aksjomat sprowadzania do wspólnego mianownika

Przykład

To
naszym zdaniem najważniejszy aksjomat. Bez niego nie można by było
upraszczać równań. Nie można też by było w większości
przypadków wyliczać niewiadomych z tych równań
Aksjomat
dzielenia ułamka przez ułamek
Podzielić
ułamek przez ułamek to to samo co pomnożyć pierwszy ułamek przez
odwrotność drugiego


Na
powyższym zdjęciu jest szkolny błąd, którego niezauważyliśmy.
To dowód jak bardzo zły nas kontroluje. Tym samym Wy ucząc się
matematyki będziecie narażeni na jego ataki. Poprawny wynik, który
dodaliśmy po paru dniach od powstania tego artykułu pokazaliśmy na
zjęciu poniżej.

Aksjomaty
funkcji trygonometrycznych
Są
to wprowadzone wielkości opisujące trójkąt, które potwierdzono
doświadczalnie. To też aksjomaty i trzeba nauczyć się ich na
pamięć.


To że
suma kwadratów sinusa i kosinusa równa jest jeden, Wielokrotnie
potwierdzono doświadczalnie i takie doświadczenie każdy sam może
sobie przeprowadzić mierząc trójkąty o różnych bokach a i b.
Mając dwa trzy udowodnione równania, można już przeprowadzać na
nich kolejne kombinacje. Pokażemy tu jedną.
Wyrazimy
tg za pomocą kosinusa

Aksjomaty
działań na równaniach znajdują się niżej. Są bardzo ważne.



Aksjomaty
działań na równaniach
Na
równaniach możemy wykonywać następujące operacje
1
Przenosić
całe wyrażenia lub liczby pojedyncze z jednej strony na drugą ze
zmienionym znakiem
Przykład
przeprowadzimy na samych liczbach. Rozpatrzmy takie równanie
2+2
= 4
Jest
ono prawdziwe, gdyż lewa strona równa się prawej. Przenieśmy
teraz zgodnie z tą zasadą dwójkę na prawą stronę
2
= 4 - 2
2
= 2
Po
takiej operacji też otrzymaliśmy prawdziwe równanie, prawa strona
równa się lewej
2
Obustronnie
mnożyć równanie przez tą samą liczbę
3
Obustronnie
dzielić równanie przez tą samą liczbę
4
Obustronnie
podnosić równanie do tej samej potęgi
5
Wyciągać
przed nawias wspólny czynnik Np.
2*x^2
-3*x = 5
Wspólnym
czynnikiem jest x wtedy
x*(2*x
- 3) = 2
Po
wymnożeniu nawiasu otrzymamy poprzednią postać równania,
Czyli
dokonaliśmy operacji upraszczającej to równanie a nie
zmieniającej.
5
Obustronnie
logarytmować równanie przez ten sam logarytm
Przykład

Dowód

W tym
przykładzie dodaliśmy i jednocześnie odjęliśmy y. Wykorzystałem
następujący aksjomat

Oraz
aksjomat wyłączania wspólnego czynnika przed nawias, którym w
podanym przykładzie jest x^2.
W
paru słowach płęta. Możemy wykonywać na równaniach takie
działania by równanie którego lewa strona równała się prawej (
w przeciwnym przypadku równanie jest fałszywe np. da wynik 2 =3 co
jest widoczną nieprawdą), po zadziałaniu na niego w wyżej opisany
sposób dalej było prawdziwe, to znaczy by dało wynik np. 2 =2.
Trzeba przede wszystkim nauczyć się tych aksjomatów, gdyż
gwarantują one prawdziwość równań, przed i po operacji na nich
Przykład


Aksjomaty
potęg

Aksjomaty
logarytmów
Logarytm
jest odwrotnością funkcji
c=
a^b
wprowadzono
więc na tej podstawie funkcję zwaną logarytmem, taką, że
b
= loga(c)
funkcja
o podstawie e, która jest liczbą równą
e
= 2,781,,,,,
Występuje
tak często w matematyce, że nadano jej specjalny symbol
loge =
ln
Liczby
a i e nazywamy podstawą logarytmu.
Poniższe
zdjęcie pokazuje opracje na logarytmach, ich tożsamości i jak
wyżej wspomnieliśmy trzeba nauczyć się ich na pamięć

Po
przez ln występujący na zdjęciu rozumiemy log o podstawie a i b,
Zrobiliśmy to po to by się przyzwyczaić do oznaczenia ln jest to
wyjątkowy logarytm po przez bardzo częste występowanie.
Znając
te aksjomaty możemy udowodnić działania na potęgach



Logarytmy
typu log o podstawie a występują w matematyce i w fizyce
sporadycznie.
Liczby
a, b i c są dowolnymi liczbami. tylko symbol e jest zarezerwowany
dla liczby 2,781....
To
samo tyczy się liczb zespolonych gdzie liczba urojona (i)
podniesiona do kwadratu daje -1, a którą wprowadzono
aksjomatycznie. We wszystkich pozostałych przypadkach ujemna liczba
podniesiona do kwadratu daje liczbę dodatnią.
Sama
liczba (i) nie ma wartości liczbowej, dopiero jej kwadrat daje -1.
Moduły we wzorach, w których występuje (i), nie bierzemy pod
uwagę, jednak zostawiamy te moduły gdyż w dalszych podstawieniach,
do innych wzorów (i) może wystąpić w kwadracie, co da jej wartość
-1. Np.
y
= a*x +i^2*x^2 = a*x+(-1)*x^2 = a*x - x^2
Po
podstawieniu iksa wynikiem liczbowym takiej funkcji jest tylko moduł
a*x
Liczbie
zespolonej nadano symbol
Z
= a - i*b
Została
wprowadzona aksjomatycznie, gdyż zaobserwowano w przyrodzie
zjawiska, które znikają w przewidujących je równaniach, a
pozostają tylko wtedy gdy wprowadzi się liczbę urojoną (i).
Znak
minus wprowadzono po to by uzyskać płaszczyznę zespoloną.
Łatwo
sprawdzić, że liczba sprzężona do liczby zespolonej równa
Z*
= a+i*b
Która
też została wprowadzona aksjomatycznie
do
liczby zespolonej, razy liczba zespolona daje
Z
x Z* = a^2 + b^2 = R^2
A
ponieważ jest to twierdzenie Pitagorasa więc wielkość ta równa
się R^2 czyli promieniowi okręgu na płaszczyźnie.
Na
osi y zaznaczamy a , zaś na osi x zaznaczamy i*b,tak jak pokazaliśmy
na poniższym zdjęciu.

Kolejnym
wzorem wprowadzonym aksjomatycznie dla liczb zespolonych jest wzór
pokazany niżej

Jest
to najprawdopodobniej aksjomat, trzeba nauczyć się go na pamięć.
na
powyższym zdjęciu sinus i kosinus powinny być w nawiasie,
przepraszamy za błąd.
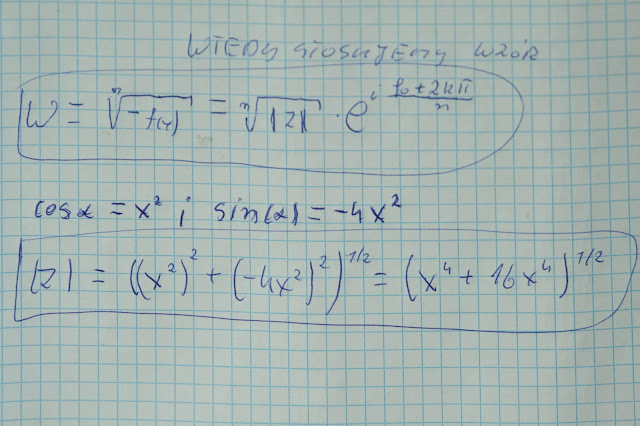
Twierdzenie
More"a

Przykład


Twierdzenie
Itstneje
dokładnie n pierwiastków liczby pod pierwiastkiem stopnia n, i
wyrażają się one wzorem :

Należy
jeszcze dodać, że moduł liczby z jest wartością bezwzględną
więc zawsze dodatnią
Przykład

Każdą
liczbę można przedstawić za pomocą pierwiastka
Wyraźnie
widać, że ten wzór stanowi nadbudowę do rozwiązania równań
kwadratowych a ogólnie n - tego stopnia, gdy n jest całkowite
dodatnie, tu mamy uzupełnienie o potęgi ułamkowe.
Bardzo
potężny wzór



Trzeba
się po prostu nauczyć tego na pamięć, to tylko parę wzorów na Z
i Z*, cała reszta wynika z logicznych zależności
Trzeba
się po prostu nauczyć tego na pamięć, to tylko dwa wzory na Z i
Z*, cała reszta wynika z logicznych zależności
Załóżmy
teraz, że opisujemy matematycznie jakieś zjawisko i wyszedł nam
trój mian kwadratowy, którego delta jest mniejsza od zera. Oznacza
to, że nie ma rozwiązania takiego trójmianu, jednak w przyrodzie
występuje takie zjawisko, co wtedy robić. Wzoru jesteśmy pewni.
Przykład podajemy na poniższych zdjęciach


Pamiętamy,
że
e^(i*fi)
= cos(fi) + i*sin(fi)
Co w
połączeniu ze wzorami

Daje
kompletne rozwiązanie. sinus plus kosinus wstawiamy za e^(i*fi), a
f(x) jest naszą funkcją, która nie dała rozwiązania w dziedzinie
liczb rzeczywistych.
Daje
kompletne rozwiązanie. sinus plus kosinus wstawiamy za e^(i*fi), a
f(x) jest naszą funkcją, która nie dała rozwiązania w dziedzinie
liczb rzeczywistych. d(f(x))/d(x) - jest pochodną tej funkcji, żeby
się dowiedzieć o pochodnych zapraszm na naszą stronę
www.latwa-matematyka.blogspot.com
Części
urojonej, to znaczy części wzoru w którym występuje czynnik (i)
nie bierzemy pod uwagę. Rozwiązaniem jest tylko część
rzeczywista, jednak części urojonej nie odrzucamy przy dalszych
podstawieniach do innych wzorów. Podstawiamy cały wzór.
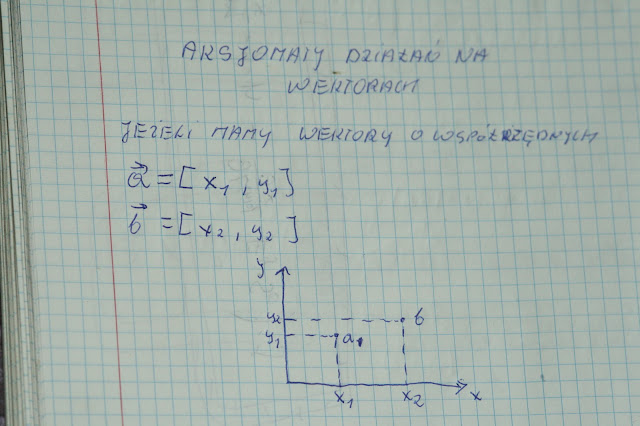
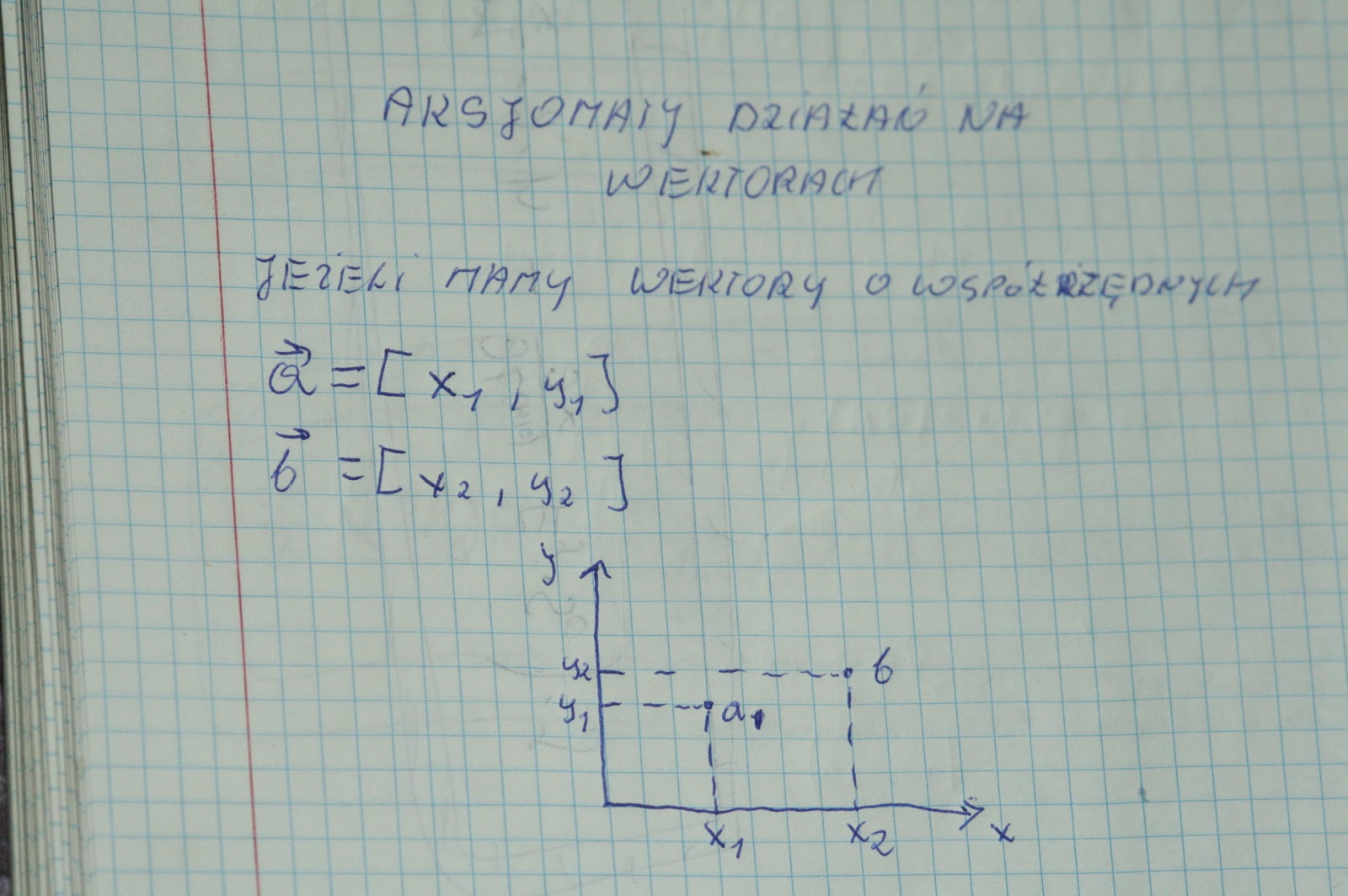
ASJOMATY DZIAŁAŃ NA WEKTORACH
Też
trzeba nauczyć się na pamięć. Podaliśmy tu wzory na sumę
iloczyn długość sinus konta alfa i kosinus między wektorami.

Aksjomat
mnożenia wektora przez wektor jest dziwnym co najmniej aksjomatem.
a+b
wcale nie równa się a*b, gdzie za a i b podstawiamy dowolne liczby.
tym samym można go traktować jako przybliżenie, choć ja znam
lepsze. Oto oto ono

Moim
zdaniem powinno być

Poniżej
zamieszczam wykres dla
a =
[3 ; 2]
b =
[4 ; 3]

Podałem błędny wynik powinno być 12,04. Przepraszam za błąd.
To
potraktujcie jako ciekawostkę nie radzę podawać go jako prawdziwe
na kolokwiach czy klasówkach gdyż wrócicie z dwóją
MOŻECIE
TERAZ PRZECZYTAĆ ARTYKUŁ - BŁĄD WSZECHŚWIATA.
tym
samym wzory podanie niżej na sin i cos pomiędzy dwoma wektorami,
trzba by było uzupełnić o podaną wyżej zależność




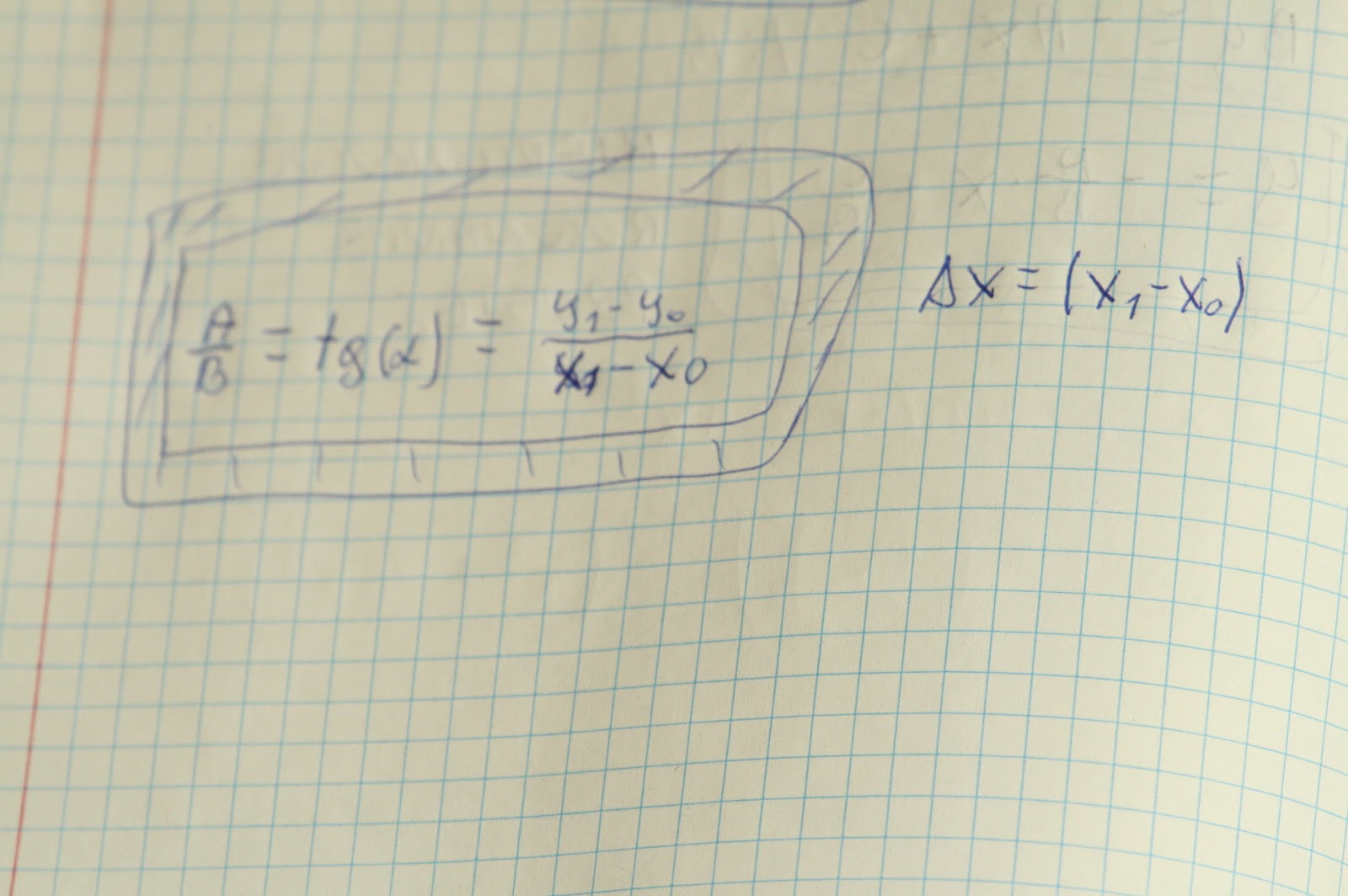
My
proponujemy rozwiązać następujący układ równań



Zauważmy,
że tangensy są pochodnymi funkcji liniowej przedstawiającej
wektory a i b i nie tylko liniowej lecz wszystkich funkcji. W ten
sposób otrzymujemy wzór na cosinus konta między dwiema dowolnymi
funkcjami. Z wyprowadzeniem sinusa sami już sobie poradzicie. Ogólny
zapis wygląda następująco

Rachunek
pochodnych znajdziecie tutaj
http//jakpowstajfraktale.blogspot.com
Dalej będziemy posługiwać się wzorami oficjalnie przyjętymi


Wzory
aksjomatyczne na sinus i kosinus między osią x

Tu
taj wzory na kosinus i sinus tyczą się kąta między osią x
Wzory
na sinus i kosinus między dwoma wektorami

We
wzorze na cos, powinno być
a1*b2
+ a2*b1
Jednak
należy pamiętać, że wzór na cosinus przyjęty przez oficjalną
naukę jest w formie podanej na zdjęciu poniżej.

Twierdzenie
kosinusów
Dotyczy
ono sytuacji gdy mamy trzy wektory, Tak jak pokazano na poniższym
zdjęciu.
By
twierdzenie było prawdziwe, wektory a i b muszą być skierowane
przeciwnie do siebie, tak jak poazałem na powyższym zdjęciu.
Zachodzi wtedy równość
c
= a-b
Stąd
c^2


Koniecznie
musi być spełniony warunek c = a-b!!!!!!!!!!!!!!!!!
Jeżeli
nie jest nie wolno stosować tego wzoru.
Koniec
aksjomatów, chyba podałem wszystkie najbardziej podstawowe. Teraz
skorzystamy z nich by wyprowadzić ogólne i kierunkowe równanie
prostej.
Do
ogólnego równania prostej dochodzimy startując z definicji
kosinusa między wektorami. Z kosinusa dlatego by dwa wektory miały
część wspólną, bu przecinały się ze sobą. Zakładamy warunek
początkowy taki, że dwa wektory są do siebie, to oznacza kont
prostopadłe, zauważmy, że taki warunek oznacza kąt równy 90
stopni a
to z kolei pociąga za sobą fakt iż cos(90) = 0
Nigdy
nie wolno dzielić przez zero gdyż taki cosinus ma granicę
niewłaściwą w nieskończoności. Dlatego licznik przyrównujemy do
zera

Sporządzimy
sobie następujący schemat

Zakładamy,
że współrzędne x0 i y0 są znane oraz znane są współrzędne A
i B. Wektor delta(P) ma współrzędne
delta(P)
= [(x-xo) ; (y-y0)] = [b1 ; b2]
i
odpowiednio A = a1 i B = a2
Podstawiamy
to do pierwszego równania otrzymanego z definicji kosinusa

Ponieważ
xo i yo są punktami zaczepienia znanymi więc
A*xo-B*yo
= c stałej. Stąd ogólne równanie prostej przechodzącej przez
punkt o współrzędnych [A ; B] ma postać

Jest
to Ogólne Równanie Prostej.
W ten
sposób nierozerwalnie połączyliśmy ze sobą prostą i punkt (a).
Ponieważ założyliśmy cos = 0 więc mamy pewność, że punkt a
leży na prostej wyznaczonej przez dwa punkty, którym drugim punktem
jest punkt P.
Kierunkowe
równanie prostej
Otrzymujemy
przez zwykłe rozwiązanie równania względem y
Jeżeli
teraz będziemy zmieniać A,B x i y, będziemy tym samym obracać
wektor P a więc i prostą na której leży. Po rozwiązaniu względem
y otrzymujemy kierunkowe równanie prostej

a
zmiana delta(y) która wynika ze zmiany A;B y i x wynosi

Z
podanych wyżej wykresów możemy napisać równość
Wstawiając
to do równania na delta(y) i pamiętając, że delta(y) = y - yo
najogólniej, otrzymamy


Jest
to równanie kierunkowe prostej
Powtórzymy
tą czynność jeszcze ra, to znaczy znowu zmieniamy x a co za tym
idzie zmienia się i y. Możemy więc napisać

Stąd
już tylko krok do pochodnej
Rachunek
różniczkowy - Pochodna
Do definicji różniczki dochodzimy startując z definicji pochodnej funkcji w punkcie, lub inaczej zwanej granicą ilorazu różnicowego. Cym jest ten iloraz różnicowy?
Jak sama nazwa wskazuje jest czegoś różnicą, a iloraz inaczej na zywamy dzieleniem.
Otóż jest to różnica dowolnej funkcji po dodaniu do niej bardzo małego przyrostu i przed dodaniem do niej tego przyrostu

Jeżeli
przykładowo mamy funkcję
f(x)
= x^2
To
delta(f(x))
= (x+delta(x))^2
Po
prostu do x- sa dodajemy bardzo mały przyrost, który oznaczono
delta(x)
= (x1 - x2).
Dalej
wszystko się wyjaśni.
Pokażemy to na przykładzie funkcji kwadratowej, którą przedstawiliśmy na poniższym rysunku.
Otóż gdy zmierzamy z delta x do punktu a=x, wtedy i delta f(x) zmierza do pewnej wartości f(a), a sama różnica
delta f(x)=f(x2)-f(x1) = f(x+delta(x))
zmierza do zera. Patrz na poniższy rysunek.

delta x jest właśnie tym małym przyrostemlub ściśle bardzo małą zmianą, tórej odpowiada bardzo mała zmiana fx.
Gdy mamy funkcję f(x), to jak już wcześniej powiedzieliśmy, dodajemy do niej delta x, ten bardzo mały przyrost.
Więc nasza różnica delta f(x) wygląda tak jak na poniższym zdjęciu.








To
ciężka granica do policzenia. Ten przykład daliśmy po to by sobie
uzmysłowić, że wzory na pochodne poszczególnych funkcji rodziły
się w bulach. Powyższy ciąg logiczny prowadzi do sprzeczności.
Stosując inny ciąg logiczny, którego nie znamy udowodniono, że
granicą jest jeden.





Aksjomatycznie
pochodną ze stałej przyjęto równą zero. Popełniłem
błąd logiczny, gdy do stałej dodamy delta x wtedy delta y = y,
wykresem jest linia pozioma dlatego pochodna ze stałej równa się
zeru.




Ostatecznie
obarczenie błędem każdego towaru dane jest wzorem.

Udowodnimy
teraz czemu równa jest pochodna funkcji złożonej typu
Y
= f(x)*g(x)
Dowód logiczny stu procentowy

Dodamy
jeszcze, że stu procentowy dowód logiczny nie stanowi ogólnego
dowodu, gdyż samą logiką możemy zawędrować w ślepy zaułek.
ogólny dowód to dowód logiczny + doświadczalny
Więcej
takich wyprowadzeń wzorów znajdziecie tutaj
Są
bardziej skomplikowane , a ten artykuł przeznaczony jest przecież
dla początkujących dlatego umieściliśmy go osobno.
Pochodne
drugiego i n -teg stopnia


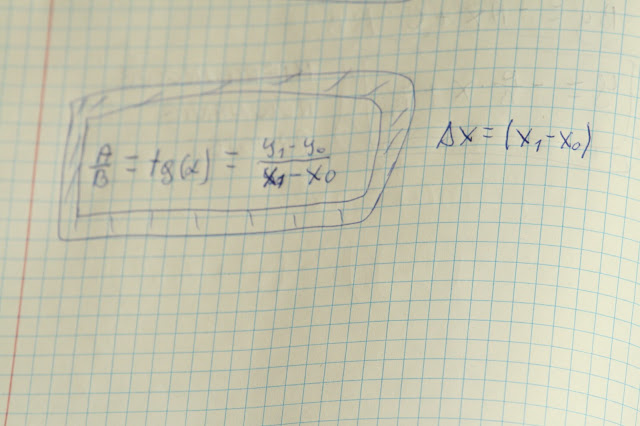
Interpretacja
geometryczna pochodnej
Ta
interpretacja jest tak prosta, że czytelnicy mogą czuć się
zawiedzeni. Otóż z trygonometrii wiadomo, że delta(y)/delta(x)
jest definicją tg(afa), a dodając granicę jak wyżej przedstawiono
otrzymujemy pochodną w punkcie. Tak więc dochodzimy do bardzo
ważnego i potężnego wniosku
Pochodna
funkcji f(x) = tg(alfa)
Więcej
znajdziecie klikając na poniższe linki
Jak
potężny to wniosek pokażemy to teraz.
Załóżmy,
że chcemy policzyć minimalne zużycie materiału przy budowie
układu LC. Wzór na L - indukcyjność cewki znajdziecie tutaj
Zakładamy,
że mamy ustalony promień r cewki i nie zmieniamy pojemności
kondensatora C. Chcemy policzyć maksymalną indukcyjność cewki
przy minimalnym zużyciu przewodnika.
Ponieważ
pochodna funkcji względem l- długości przewodnika, jest tangensem
konta alfa (patrz na rysunek pod pierwszym linkiem), więc maksimum i
minimum występuje wtedy gdy, pochodna względem (l), jest równoległa
do osi x, wtedy tangens alfa jest równy zero. Przyrównujemy więc
pochodną funkcji L(l) do zera, po czym wyliczamy, z otrzymanego
wzoru wyliczamy l- długość przewodnika. Należy zwrócić uwagę
na to, że otrzymamy kilka rozwiązań, np dla równania kwadratowego
otrzymujemy dwa rozwiązania, należy więc wybrać rozwiązanie
przy, którym długość przewodnika jest minimalna.
W
przyszłości opiszemy tutaj rozwiązania równań różniczkowych
pierwszego i drugiego rzędu.
Nauka
powinna być darmowa, nie możemy patrzeć i siedzieć bezczynnie
widząc strony z płatnymi rozwiązaniami. Nasz blog jest całkowicie
darmowy i tym samym może ukróci ten zbrodniczy proceder.
Granice
i asymptoty funkcji
Twierdzenie
de L"Hospitala (Delopitala)
Jeżeli
istnieje granica ilorazu pochodnych dwóch funkcji, to istnieje też
granica ilorazu tych funkcji i te granice są sobie równe.
Co
zapisujemy

Nie
możemy nigdzie zdobyć dowodu go twierdzenia więc trzeba
potraktować go aksjomatycznie i nauczyć się na pamięć. To bardzo
potężne twierdzenie oto parę przykładów:







Asymptoty
pionowe i ukośne funkcji
Rozpatrzmy
funkcję taką jak pokazano na zdjęciu poniżej

Asymptoty
to proste do których zmierza funkcja w nieskończoności. Gdy x
zmierza do 2 wtedy wyrażenie w nawiasie zmierza do zera, a tym samym
cała funkcja zmierza do nieskończoności. Ponieważ w nawiasie
występuje równanie kwadratowe więc cała funkcja zmierza też do
nieskończoności dla liczby -2, gdyż kwadrat liczby ujemnej daje
liczbę dodatnią. May więc tym samym określone dwie proste,
stanowiące asymptoty pionowe dla powyższej funkcji. A dzielenie
liczby przez liczbę bliską zeru to to samo co pomnożyć
pierwszą liczbę przez odwrotność tej drugiej małej. Liczba
bliska zeru jes przecież ułamkiem. Jeszcze raz powturzymy aksjomat.
Podzielić ułamek przez ułamek to to samo co pomnożyć pierwszy
ułamek przez odwrotność drugiego. Więcej znajdziecie tutaj
Asymptoty
ukośne
Te
wyznaczamy z twierdzenia, którego trzeba nauczyć się na pamięć.
Oto to twierdzenie:
Asymptota
ukośna lewo i prawo stronna, jest to prosta o równaniu

Gdzie
(m) oraz (k) wyznaczamy z równań:

Przy
czym wyznaczamy dwa rozje (k) badając osobno granice dla plus i
minus nieskończoności.
Dalej
badamy powyższą funkcję


Tu
nie było konieczne zastosowane twierdzenia Delopitala, jednak
bardzo
często korzysta się z niego przy wyznaczaniu asymptot.
Mają
(m) podstawiamy je do drugiego wzoru





Pamiętamy,
że funkcja zmierza do każdej z trzech wyznaczonych asymptot.
Nanosząc je na wykres logicznie kombinując do logicznej
całości, otrzymamy następujący wykres tej funkcji

Zawsze
badamy funkcje w jej szczególnych punktach, tutaj są to +2 i -2 z
prawej i z lewej strony z osobna dla każdej z tych liczb i
pamiętamy, że asymptoty funkcji to proste do , których ta funkcja
zmierza w nieskończoności.
Wykresy
funkcji można rysować jeszcze dokładniej. Sposób ten opiszemy
poniżej.
Przebieg
zmienności funkcji










Pamiętamy,
że miejsca zerowe pierwszej pochodnej podstawione do funkcji
wyjściowej (pierwotnej) dają maksima i minima tej funkcji, a
miejsca zerowe drugiej pochodnej dają punkty przegięcia funkcji
pierwotnej.. W powyższym przykładzie druga pochodna nie ma miejsc
zerowych. Punkt przegięcia funkcji to punkt w którym funkcja zmieni
swoją krzywiznę z + na -. .
Cdn.
Równania
różniczkowe zerowego rzędu
Ugięcie
belki nieobciążonej
Nie
uwzględnimy tu momentu siły działającej na pręt, zrobimy to
później.
Czynimy to po to by mógł poćwiczyć rozwiązywanie równań
różniczkowych zerowego rzędu.
Rozpatrzmy
belkę zamocowaną do ściany, tak jak pokazano niżej. Policzymy
długość L tej belki po odkształceniu. Beka nie jest obciążona
ciężarem więc ugina się skutkiem swojej własnej masy.

Układamy
warunek równowagi sił.
Gdy
mamy ustalone wychylenie, wtedy siłę grawitacji f równoważy siła
sprężystości f =k*s

Zmieniając
teraz długość pręta zmienia się też siła f , zmienia się
zarówno masa jak i przyśpieszenie.

Takie
rozpisywanie bardzo małych zmian, to podstawa działań
matematycznych.
Po
całkowaniu i różniczkowaniu takich wzorów wychodzą makro wzory.




Stałe
c1 i c2 wyznaczymy z warunków początkowych, kiedy t = 0
wtedy
wychylenie równe zero i c1 = c2 =Lo

w
rzeczywistości koniec pręta będzie opadał ruchem jednostajnie
opóźnionym, skutkiem oporu sprężystości materiału. Jednak dla
większości przypadków można to zaniedbać.
W
artykule
www.latwa-matematyka.blogspot.com
Wyprowadziliśmy
wzór dla spadku swobodnego z oporem ośrodka. Kto dociekliwy może
sobie tą wielkość podstawić za wychylenie.
Czas
t ruchu końca pręta w polu grawitacyjnym wynosi


Prawo
Hoke"a

Jest
to wzór opisujący naprężenie w pręcie (belce) nieobciążonej.
Belka
obciążona masą
Znowu
układamy równanie sił
Siła
pochodząca od nieobciążonego pręta plus siła pochodząca od
zawieszonej na jego końcu masy, równa się sile sprężystości.

N -
jest momentem siły, równym N = PxR należy ją uwzględnić chcąc
dokładnie opisać to zjawisko. Czytelnik już pewnie zauważył, że
podany wyżej wzór na długość łuku L jest mocno przybliżony,
gdyż nie uwzględnia momentu siły, która przecież istnieje nawet
gdy pręt nie jest dodatkowo obciążony. Wyprowadziliśmy taki wzór
po to by stopniować stopień trudności. Każdy czytelnik zauważy,
że czeka go trudny orzech do zgryzienia.
P-
jest siłą pochodzącą od zawieszonej masy równą M*g.
Po
prwej stronie równania powinien być minus. R jest x równym L =
l*R*cos(alfa), gdzie l jest długością pręta, ściślej długością
łuku a L tak jak pokazano na pierwszym zdjęciu bezpośrednią
prostą odległością do zawieszonej masy.


Przyrównaliśmy
do zera by otrzymać równanie różniczkowe jednorodne, które jest
też rozwiązaniem tego równania. Równanie różniczkowe
niejednorodne to równanie bez ej operacji. Suma tych dwóch
rozwiązań daje też rozwiązanie tego równania różniczkowego.
Skoro rozwiązanie szczególne jest rozwiązaniem tego równania więc
Stałą c wyznaczymy z warunków brzegowych, które tu ciężko
zastosować zastosujemy więc analizę wymiarową, skoro y jest
odwrotnością masy więc i stała c musi być jej odwrotnością
gdyż sama funkcja wykładnicza jak też logarytmiczna nie posiada
wymiaru. Możemy wiec napisać

Bardzo
ważny sposób całkowania. Podamy przykład
To
nasz sposób, który zastosowaliśmy w dalszej części tego
artykułu. Niestety nie jesteśmy go pewni!!!!!!!!!!!!!!!!!!!!.

Podstawiamy
to do równania , ale niejednorodego, możemy tak uczynić gdyż
zgodnie z teorią rachunku różniczkowego rozwiązanie szczególne
jest rozwiązaniem równania ogólnego. Oznacza
to, że poszczególne rozwiązania są tożsame, czyli można je
przyrównać do siebie.

Po
rozwiązaniu względem d^2(L)/d(t)^2 otrzymamy

Należy
zapamiętać to równanie a ściślej to zdjęci, gdyż głowa to nie
śmietnik i uczymy się tylko sposobów wyprowadzeń i wniosków
końcowych z tych wyprowadzeń.
Pójdziemy
teraz równoległą drogą by wyznaczyć d(N). W tym celu robimy
rysunek elementarny ugiętej belki, jak by powiększenie jej bardzo
małego elementu, czynimy
to po to by ułożyć mikro równania, z których przez całkowanie
otrzymamy makro równania.

Zastosujemy
tu słynne prawo Hoey"a oraz zauważymy, że bardzo mały
element powierzchni d(S) = b*d(y)
b -
jest wymiarem poprzecznym wymiarem belki i nie ulega zmianie podczas
zginania. Oczywiście zmiany te zachodzą, ale są tak małe, że
możemy je pominąć.
d(y)
- elementarnym wydłużeniem całej długości pręta. Zmiana ta jest
bardzo silna, długość prostej belki (przed ugięciem)jest dużo
mniejsza od jej wymiarów liniowych, po ugięciu.
Prawo
Hoke"a mówi, że prostopadły nacisk siły F na powierzchnię
S, równa się

Prawo
Hoke"a przedstawia pierwsze równanie na zdjęciu.
Dalsze
wyprowadzenie jest zbyt ciężkie by je tutaj zamieszczać, a prace
nad nim trwają tutaj
Równanie
różniczkowe pierwszego rzędu
Równanie
różniczkowe pierwszego rzędu wygląda następująco

Z
tak określonego równania należy wyliczyć (y). Jest to rozwiązanie
wyżej pokazanego równania różniczkowego. Pokazano je na poniższym
zdjęciu

Wyprowadzenie
rozwiązania - Dowód logiczny
Po
pierwsze rozdzielamy zmienne, czyli y-ki przenosimy na jedną stronę
a x - sy na drugą.
Po
drugie, korzystamy z wcześniej udowodnionego twierdzenia, że
całkowanie jest odwrotnością różniczkowania, kliknij na poniższy
link, tu umieściliśmy dowód

Należy
szczególną uwagę zwrócić na fakt iż P(x) jest
równe całce(p(x)dx
Przykład
zastosowania
Rzut
poziomy z uwzględnieniem oporu powietrza
Jako
przykład weźmiemy ruch poziomy z oporem powietrza. Na początku
ciało ma prędkość v0. Skutkiem oporu powietrza prędkość ciała
będzie spadać. Siła oporu jest proporcjonalna do prędkości
ciała, i równa
Fop
= k*v
Więcej
na ten temat znajdziecie tutaj
Skutkiem
występowania siły oporu ciało będzie zwalniać wytracając
prędość. ponieważ następuje zmiana prędkości ciała więc
doznaje ono przyśpieszenia, równego (a). ponieważ ma masę więc z
drugiego prawa Newtona wiemy, że doznaje ono siły, równej
F
= m*a
Z
fizyki wiemy, że zmiana drogi w czasie równa jest prędkości, a
zmiana prędkości w czasie równa jest przyśpieszeniu. Dodając do
tych wzorów granicę, gdy czas zmierza do zera, w sposób opisany
wyżej, dowiemy się, że prędkość jest pochodną drogi po czasie,
a przyśpieszenie jest pochodną prędkości po czasie

Do
celów zadania przyjmiemy m*dv/dt = -k*v Po to by otrzymać równanie
różniczkowe takie jak przedstawiliśmy wyżej. Znak minus bierze
się z faktu, że siła oporu jest przeciwnie skierowana do siły
ciągu.

Korzystając
z tego, że całkowanie jest odwrotnością różniczkowania więc
całkując otrzymaną prędkość po czasie otrzymamy drogę. Więcej
na ten temat znajdziecie tutaj
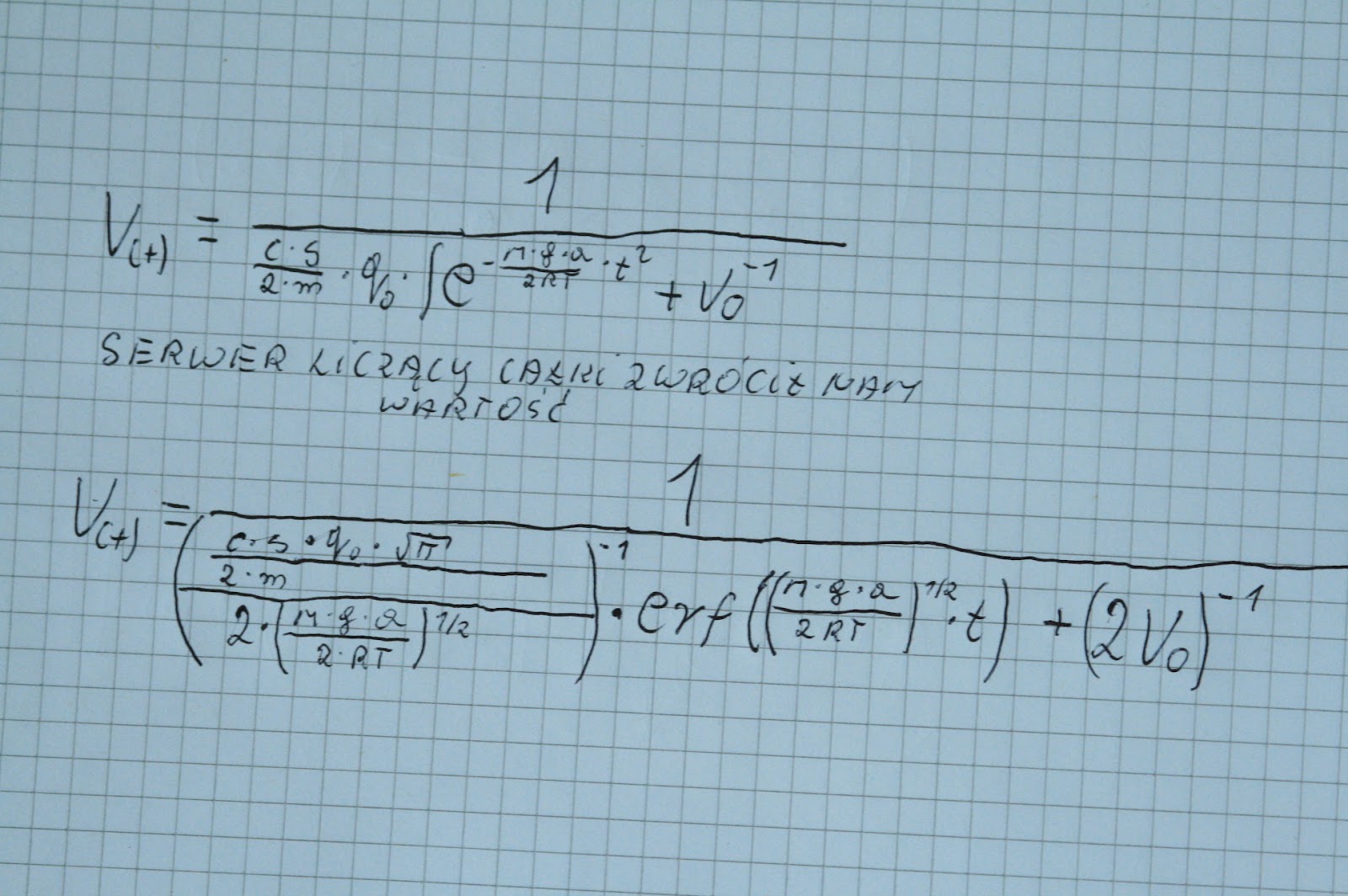
Całki
liczy się ciężko dlatego radzimy skorzystać z serwera liczącego
całki. Serwer znajdziecie pod tym adresem
Który
zwrócił nan następującą całkę będącą wzorem na drogę z
uwzględnieniem oporu powietrza. Na tym serwerze stałą -k/m
wpisujemy jako np. A a za t wstawiamy x, puźniej dokonujemy
podstawienia.

Przykład
z siłą wyporu samolotu
Równanie
na siłę wyporu samolotu wyprowadza się z równania Bernouliego.
Informację na ten temat znajdziecie tutaj
Ponieważ
siła wyporu siła nośna samolotu zależy od gęstości powietrza
więc w końcu przy pewnej wysokości zrównoważy ją siła
grawitacji., SIŁĘ OPORU POMINIEMY, TYM SAMYM ROZPATRUJEMY LOT
SAMOLOTU BEZ OPORU OTACZAJĄCEGO GO OŚRODKA, ZROBIMY TAK PO TO
BY UPROŚCIĆ TO ZADANIE Tto zadanie już jest trudne dla
początkujących, również i poniższy przykład. Napiszemy tylko
równanie dla takiej sytuacji. Cała sztuka polega na ułożeniu
równania równowagi sił po czym twożymy z tego równania równwnie
różniczkowe w sposób podany wyżej.
Wypadkowa
siła wznoszenia jest równa sile grawitacji minus siła wyporu co
zapisujemy
m*a
= -m*g - C*S*q(h)*v2/2
W
sytuacji już ustalonej wysokości siła ciągu skierowanego do góry
zanika, zrównoważona przez siłe grawitacji tak, że pozostaje
rozwiązać równanie
m*g
= - C*S*q(h)*v2/2
g-
przyśpieszenie ziemskie
c
- stała bezwymiarowa siły wyporu zależna od kształtu skrzydeł
samolotu, dużo mniejszym stopniu zależna od kształtu kadłuba
S
- powierzchnia skrzydeł
q
- gęstość powietrza zależna od wysokości
v
- prędkość liniowa samolotu
m*g
traktujemy jako stałą gdyż zmiana przyśpieszenia ziemskiego g, w
przypadku samolotu można zaniedbać, jednak w przypadku lotów
kosmicznych trzeba założyć zmienne g.
Dalej
w formie zdjęć


Ponieważ
q zależy od wysokości, która pośrednio zależy od czasu t, więc
za d(t) podstawiamy d(h). Wzór na q(h) znaleźliśmy w internecie.
Stałą zaś wyciągamy przed całkę. Dodamy jeszcze, że
całka(1)*d(x)
= x
(Stała
całkowa c, którą pominęliśmy na tym razem poniższym zdjęciu,
jest równa v0. W ogóle stałe całkowe wyznaczamy z warunków
początkowych danego zjawiska, lub końcowych.)
Najczęściej
jedynki nie piszemy wtedy mamy
całka
d(x) = 1

Niefortunnie
występują w powyższym wzorze dwa oznaczenia c, należy pamiętać,
że pierwsza stała c na zdjęciu to stała wyporu
q0
- gęstość przy gruncie
R
- stała Rytberga
M
- masa molowa powietrza lub innego ośrodka
T
- temperatura ośrodka
W
ten sposób otrzymujemy wzór na prędkość wznoszenia samolotu
h(t)
= 1/2*a*t^2
Gdyż
samolot posiada wypadkowe przyśpieszenie skierowane do góry. Możemy
siłę grawitaci i opór pominąć gdyż takie są powyższe
założenia Niżej, przy rozwiązywaniu równania różniczkowego nie
jednorodnego, wyprowadzono wzór na prędkość z uwzględnieniem
oporu powietrza i siły grawitacji. Pochodna tej prędkości po
czasie da przyśpieszenie (a). Da to jeszcze lepsze przybliżenie
otrzymanego niżej wzoru na wysokość lotu samolotu.Podstawiając te
wzory do równania , wyprowadzonego tutaj na h(t) otrzymamy równania
z uwzględnieniem siły grawitacji i oporu. Kto ma ochotę, może
podstawić to do wzoru przedstawionego na drugim poniższym zdjęciu
zdjęciu (To będzie żmudna robota).
Całki
powyższego równania serwer nie potrafi policzyć. By policzyć
drogę konieczna jest znajomość równań różniczkowych drugiego
rzędu. Można jednak w przybliżeniu policzyć tą drogę całkując
p(x) nie po czasie lecz po wysokości h, na pierwszym zdjęciu, gdzie
jest klamrą zaznaczony układ równań, pomijamy ostatnie równanie,
które uwzględnimy dopiero po wyliczeniu drogi h(t). Żeby serwer
policzył nam taką całkę trzeba pozbyć się plusa, po przez
zastosowanie przybliżenia, które pokazujemy na poniższym zdjęciu,
przy czym bierzemy do równania pierwszy wyraz rozwinięcia,
następnie naprawiamy równanie analizą wymiarową.

W
ten sposób otrzymaliśmy przybliżony wzór na wysokość lotu
samolotu

Funkcja
erf , silnie zmierza do zera dla t zawartego od 1 do 3 sekund.
powoduje to bardzo silną siłę przyziemiającą od chwili uzyskania
prędkości nośnej v0 i twa około przez trzy sekundy początkowego
lotu. Po upływie tego czasu bardzo silnie zmierza do jedności.
Teraz
rozumiemy powiedzenie, że najniebezpieczniejsza jest faza startu i
lądowania. Wzór wydaje nam się być dość dokładny po mimo to,
że pominęliśmy siłę przyciągania ziemskiego m*g oraz siłę
oporu. Naszym zdaniem napewno ten wzór pokazuje sedno problemów z
jakimi mierzy się przemysł lotniczy. Można ten wzór dodatkowo
uściślić. Zauważmy, że różniczując po czasie otrzymany wyżej
wzór na pdkość wznoszenia samolotu, otrzymamy jego przyśpieszenie,
jednak jest to przyśpieszenie bez uwzględnia siły grawitacjii,
czyli tym samym taki wzór opisuje stan nieważkości.
Należy
jeszcze odjąć drogę wynikającą z siły oporu, co pokazaliśmy na
powyższym zdjęciu. W tym przypadku
h(t)
= vop*t
My
tego równania nie pokarzemy, gdyż rozmiar zeszytu stał się za
mały. Jeszcze raz przypominamy, za v należy podstawić po
niżej wyliczone v.
Niech
karzdy czytelnik sam się zastanowi czy należy odejmować drogę
1/2*g*t^2. My sami nie jesteśmy pewni. Droga vop*t zawiera już
w sobie tą drogę, widać to w poniżej ułożonej równowadze sił.
Możliwe że sama ta droga wystarczy. Zauważmy jak pięknie zgrało
się powyższe przybliżenie lotu, stosując niżej wyprowadzone
wzory otrzymujemy rozwiązania z oporem powietrza. Te równania
stanowią całość kompletny układ równań dla ciała którego
gęstość jest dużo większa od gęstości otaczającego go
powietrza. Niestety tych równań nie da się zastosować do opisu
np. napompowanego balona gdyż w takim przypadku dużą rolę odgrywa
siła wyporu statycznego, której w tych równaniach nie
uwzględniliśmy.
Stanowi
to końcowe rozwiązanie
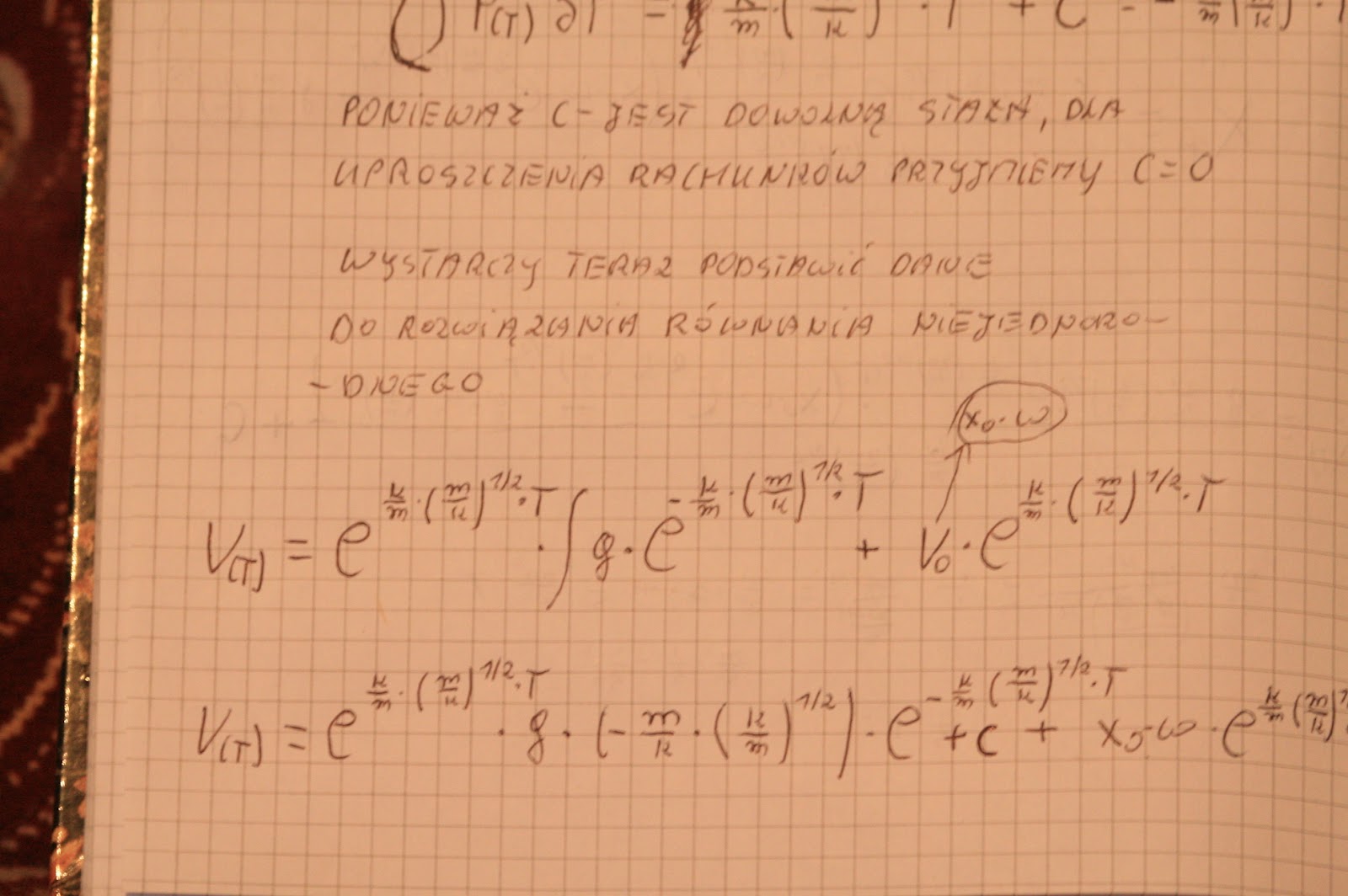
Równanie
różniczkowe pierwszego rzędu nie jednorodne
Jest
to równanie, w którym stała C występująca w rozwiązaniu
powyższego równania, jest zmienną zależną od x. Wtedy
rozwiązanie takiego równania wygląda następująco. Dodamy tylko
że
y
= c*e^P(x)
W
ten sposób poniższe równanie jest powiązane z powyższym.



Przykład.
Rzut pionowy z uwzględnieniem oporu powietrza
Na
ciało rzucone do góry działają siły Grawitacji i oporu
powietrza. Wypadkowa siła to
m*a
= -m*g - k*v
Gdzie
m*a jest siłą wypadkową. Następnie przyśpieszenie a
przedstawiamy w postaci
a
= d(v)/d(t)
Siła
m*g przyjmujemy jako stałą gdyż rozpatrujemy niewielką wysokość
rzutu. Pierwsze równanie przedstawimy w postaci
m*d(v)/d(t)
+ k*v= -m*g
Po
podzieleniu obu stron równania przez m otrzymamy równanie
różniczkowe nie jednorodne
d(v)/d(t)
+ k/m*v= -g
Łatwo
udowodnić przeprowadzając ponownie przedstawiony wyżej dowód, że
U(t)
= -g
i
jest stały
A
P(t)
= k/m
Całka
P(t)*d(t) = k/m*całka(d(t)) = k/m*t
Po
podstawieniu tych równań do wzoru na rozwiązanie równania
różniczkowego niejednorodnego otrzymamy


Zamoiast
S0 powinno być V0
Dodamy
tylko, że całka sumy wyrazów lub różnicy jest równa sumie
całek!!!!!!!!!!!!!!
Rzut ukośny z oporem powietrza. Krzywa balistyczna
Poprzednio
otrzymaliśmy wzór na drogę w rzucie poziomym. W rzucie ukośnym
wypadkowa prędkość rozkłada się na prędkość w kierunku x i h
- który jest wysokością. Prędkość w kierunku x
v(x)
= vw*cos(alfa)
A
w kierunku h
v(h)
= vw*sin(alfa)
Tak
więc otrzymane drogi wystarczy pomnożyć przez sin i cos


Zamiast
S0 powinno być V0
Ostatni
przykład kończący ciąg trudności. Dodamy tu analizę wymiarową.
Dalej wyjaśnimy czym ona jest.
Ruch
drgający ciała zawieszonego na sprężynie - Wahadło
Tak
jak poprzednio układamy równanie sił
Wypadkowe
przyśpieszenie
m*a
będzie
równe sile sprężystości
k*x
której
kierunek jest okresowy raz jest zgodna raz przeciwna, to samo tyczy
się siły m*a, która działa raz zgodnie tym razem z siłą
grawitacji m*g , raz przeciwnie.
Jednak
jak pokazujemy na zdjęciu gdy za przyśpieszenie podstawimy drugą
pochodną po czasie wtedy otrzymamy równanie różniczkowe drugiego
rzędu, o którym będziemy pisać w tym blogu w przyszłości.
Dlatego sprowadzamy to równanie do równania różniczkowego
pierwszego rzędu, wykorzystując pierwsze równanie pokazane na
zdjęciu.

Kto
nie rozumie pierwszego równania powinien zapoznać się z całym
artykułem, który znajdzie klikając na poniższy link
Periodyczność
wychylenia za gwarantujemy mnożąc x przez cos(alfa), zmianę konta
za gwarantujemy równaniem
afa
= omega*T
gdzie
omega
= 2*(pi)/T
T
- jest okresem drgań, który łatwo można zmierzyć
Tak
więc
x(T)
= x0*cos(omega*T)
gdzie
x0 - jest początkowym wychyleniem, które my nadaliśmy rozciągając
sprężynę
Prędkość
drgań osiągniemy różniczkując powyższe równanie względem
okresu T. Dalej w formie zdjęć


Przy
czym wypadkowa siła jest zawsze przeciwnie skierowana do siły
sprężystości, dlatego dajemy przeciwny znak

Całka
prędkości po czasie da wychylenie x(T).

Jest
to droga ciała bez siły tłumiącej. Siła grawitacji nie jest siłą
tłumiącą .
Jest
to wzór przybliżony, gdyż nie uwzględniliśmy sinusa z tego
powodu, że całka byłaby zbyt skomplikowana do policzenia.
Równanie
różniczkowe drugiego rzędu i n-tego rzędu. Ogólne rozwiązanie
równań różniczkowych n-teg rzędu o współczynnikach stałych.
Ogólnym
rozwiązaniem tego typu równań różniczkowych jest funkcja

Trzeba
sobie przypomnieć dział matematyki dzielenie wielomianu przez
wielomian, gdyż r występuje w takiej potędze, jak rząd równania
różniczkowego. Dla równania różniczkowego trzeciego rzędu r
będzie w trzeciej potędze co oznacza trzy rozwiązania. Tą
uniwersalność zawdzięczamy własności funkcji potęgowej y =
e^(r*x), a ściślej jej pochodnej, której wzór wygląda
następująco. Stałe q i P nie można uzmienniać, tym samym
oznaczają dowolne stałe nie zależne od x.

Dowód
dla równania różniczkowego drugiego rzędu





a

Można
by bardzo łatwo sprawdzić czy wzór powyższy zachodzi dla
uzmiennionych stałych, ale każdy czytelnik zrobi to we własnym
zakresie.
Twierdzenie
Suma
poszczególnych rozwiązań równania różniczkowego jest też
rozwiązaniem tego równania.
Dalszy
dowód leży w zakresie czytelnika. Jest łatwy wystarczy podstawić
rozwiązanie do równania różniczkowego, różniczkujemy je dwó i
jednokrotnie. Jeżeli rozwiązanie jest poprawne powinniśmy otrzymać
- lewa strona równa prawej – stronie równania.
Rozwiązanie
równania różniczkowego- tożsamość różniczkowa
Najpierw
udowodnimy wzór na moment pędu L, który z definicji równa się
L
= m*v*r
Na
zdjęciu pokazaliśmy sposób przejścia do innego zapisu tej
wielkości

Zbadamy
teraz jak zależy promień wodzący punktu m czyli jego tor ruchu od
konta, który zależy od czasu.
Zastosujemy
tu pewne przekształcenie matematyczne oto ono

Zauważmy
że tak naprawdę kont fi skraca się i otrzymujemy klasyczną
definicję prędkości. Równanie na prędkość przedstawiliśmy w
takiej postaci gdyż pochodna kąta po czasie równa się omedze,
którą wyprowadziliśmy na pierwszym zdjęciu. Możemy więc
przedstawić to równanie w postaci:

By
lepiej zrozumieć tą konwencję wyciągania pochodnej, podamy
przykład

Całkowita
pochodna równa się pochodna funkcji zewętrznej, gdzie fi traktujmy
jako x razy pochodna funkcji wewnęŧrznej fi, gdzie t tym razem
traktujemy jako x.
Ponieważ
szukamy przyśpieszenia więc z powyższego równania wyciągamy
pochodną, Pamiętając , że r zależy od fi i od czasu, czyli jest
funkcją uwikłaną, oraz dalej stosujemy wyżej opisaną sztuczkę.
Jest
to dość ciężkie więc wyprowadzeniu pokazanemu na poniższym
zdjęciu trzeba poświęcić trochę uwagi.

W ten
sposób otrzymaliśmy przyśpieszenie, jednak to jeszcze nie jest
koniec. Zwróćmy uwagę na nawias, otóż ktoś zauważył, że
druga pochodna z funkcii, którą oznaczymy
b
= 1/r,
jest
równa wyrażeniu w nawiasie
Dowód

Tu
też przykład, w tym przypadku r zależy od fi a fi nie zależy od
czasu.


W tym
przypadku r traktujemy jako zależne od samego siebie.
Przy
czym zachodzi to tylko wtedy gdy b zależy od kąta fi a ten nie
zależy od czasu!!!!!!!!!!!!.
To
bardzo potężny wniosek
W
powyższym wyprowadzeniu r zależy od kąta fi więc jest funkcją
złożoną!!!!!.
Więc
przyśpieszenie możemy zapisać w postaci:

Przed
całym wyrażeniem powinien być minus.
Lub w
bardziej przejrzystym zapisie

Bardzo
potężne równanie. Jako przykład wyprowadzimy wzór na tor ruchu
cząstki w polu sił centralnych.
Układamy
równanie sił, wypadkowa siła będzie równa sile grawitacji minus
siła odśrodkowa działająca na cząstkę

Za
drugą pochodną r podstawiamy wcześniej wyliczony wzór

Zależność
promienia od czasu została wyprowadzona tutaj. Kąt fi
wprowadziliśmy sztucznie, przez co nie rozpatrujemy w tym przypadku
pola sił centralnych. W polach sił centralnych droga nie zależy od
kąta.

Druga
całka z cos(fi)^(-1) wygląda następująco

Dwo
krotna całka z jedynki da
C1*(fi)
kąt
ten policzymy ze wzoru, który został wyprowadzony tutaj

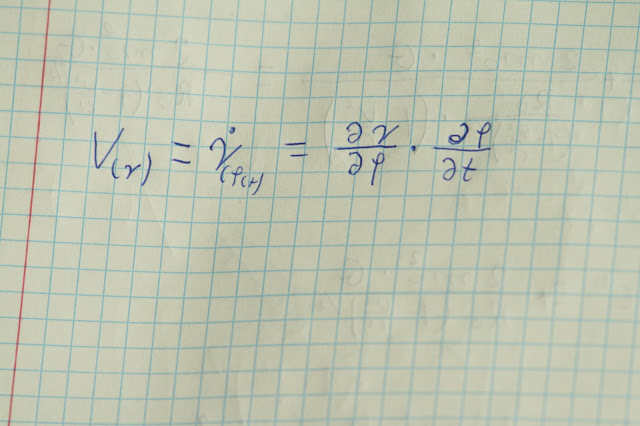
Prędkość
policzymy w następujący sposób


Gdzie
za r wstawiamy wcześniej wyliczone r.
Bardzo
długi i skomplikowany wzór
Można
też rozwiązać to równanie w następujący sposób gdy założymy,
że r nie zależy od fi


C1
i C2 trzeba wyznaczyć z warunków brzegowych.
Na
koniec najogólniejsza postać tego równania
Zauważymy,
że:




Wraz
ze wzorami na podany wyżej sinus i kosinus, otrzymujemy bardzo mocną
całość prawdzią potęgę
W
wyżej wymienionym posście ( jeszcze raz link do niego)
zależność
promienia od konta fi została wprowadzona sztucznie, Tam jest dowód,
że w polu sił centralnych prędkość nie zależy od kąta, Ten kąt
twoży się skutkiem wyżej opisanego równania.
Jeżeli
w tamtym równaniu nie stosować przybliżenia tylko wyciągnąć
stałą przed pierwiastek wtedy...........
Ale
karzdy czytelnik sam się domyśli o co chodzi.
Oczywiście
chodzi na prędkość gdyż ta występuje w powyższym wzorze,
lub wyrażając się ogólnie matematycznie, o pierwszą pochodną
funkcji po x-sie
Cdn.
Bardzo przydatne wzory
Są
to bardzo ważne wzory, bez nich nie sposób wyobrazić sobie
rozwiązywania skomplikowanych równań matematycznych. Choć
rozwinięcia w szereg nie dają dokładnych wyników to jednak można
wziąć dowolną liczbę sum danego wzoru i otrzymać wynik z
dowolną dokładnością.
Pierwszy
wzór nie wiemy kto wyprowadził
Drugi
wzór to szereg Maclarena, opiera się na sumie pochodnych funkcji.
liczba a jest punktem wokół którego rozwijamy funkcję, prawie
zawsze jest to zero lub jeden.f(a)" oznacza wartość pochodnej
po podstawieniu liczby a za x. Za e^x podstawiamy dowolną funkcję
f(x).
Kto
wyprowadził trzeci wzór, też nie wiemy.


http://jakpowstajfraktale.blogspot.com/
Rachunek
całkowy
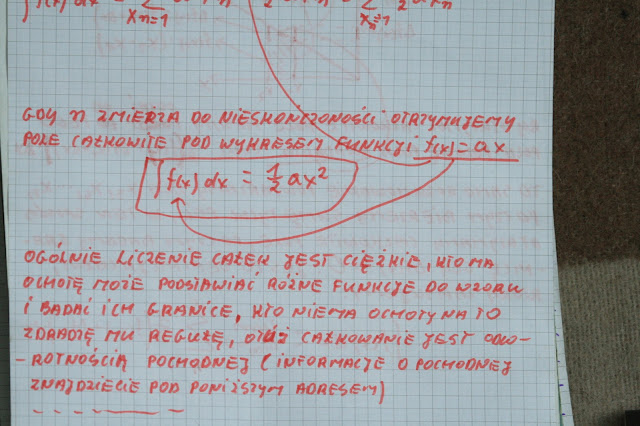
Poniższy
wykład został przedstawiony tylko dla funkcji f(x) = a*x, Tym samym
wzór na całkę podany niżej, jest poprawny tylko dla tej funkcji,
nie mniej jednak oddaje samo sedno całkowania, a oto Nam przecierz
chodziło, o to by oddać sedno całki bez wdawanie się w szczegóły,
które choć ważne to jednak zaćmiewają ogólny obraz całkowania
u osób, które nie chodzą na studia. To samo tyczy się rachunku
różniczkowego i tensorowego które znajdziecie po poniższymi
adresami
Tu
też nie wdawaliśmy się w zbędne szczegóły. Wykład został
przedstawiony w formie zdjęć
i
został zamieszczony pod poniższym adresem
Wogóle
cała nasza strona dedykowana jest przedewszystkim dla takich osób,
zamieściliśmy na niej zagadnienia z fizyki i mamtematyki z
zastosowaniem metod matematycznych spotykanych na studiach






Do
każdej całki należy dodać stałą (C), którą wyznacza się z
warunków brzegowych otrzymanej funkcji, np gdy mamy funkcę
prędkości do tego wzoru podstawiamy prędkość równą zeru, to co
zostanie po takim podstawieniu jest właśnie tą stałą.
Dla
bardziej dociekliwych udowodnimy, że całkowanie jest odwrotnością
pochodnej.
wykład
na temat pochodnej zamieściliśmy tutaj
W tym celu równanie

Przekształcimy
w następujący sposób


Definicja
całki na zdjęciu powyższym bierze się z konieczności by ta
pochodna zmierzała do f(xi) gdy delta x zmierza do xi.
Dokładny
wzór całki z przedstawionego wyżej ciągu logicznego jest
taki jak pokazuje zdjęcie poniższe, jednak jest to nie uznana
oficjalnie przez świat naukowy wersja. Oficjalnie uznany wzór
pola pod dowoną krzywą pokazuje zdjęcie powyższe

Serwer
liczący całki
Radzimy
korzystać z tego serwera, po co się biedzić i grzebać się w tych
małych przyrostach skoro już ktoś to zrobił. Mając równanie
chcemy szybko otrzymać wynik
Całki
podwójne i n-tego stopnia
Przykład
pokazaliśmy na zdjęciu. Sprawa jest naprawdę prosta. Ponieważ
całkowanie jest odwrotne do różniczkowania więc to samo tyczy się
pochodnych.

Całkowanie
przez części - Bardzo ważny wzór
Podamy
ten wzór bez dowodu. Jeżeli znamy funkcje h(x) taką, że pochodna
tej funkcji równa się f(x), wtedy zachodzi wzór

Metoda
całkowania przez części wynika ze wzoru
Bardzo potężnym narzędziem całkowania jest metoda całkowania przez podstawienie







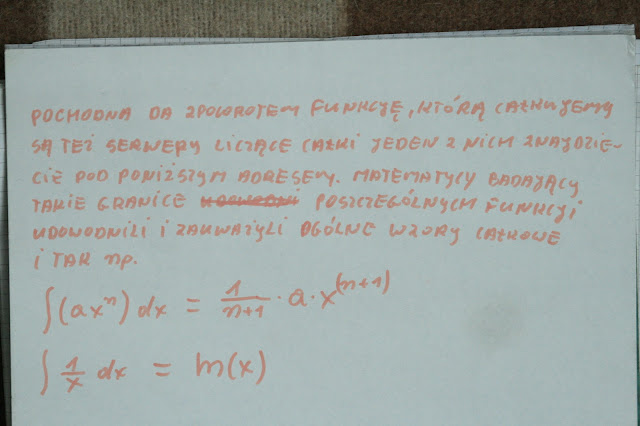
Oto
bardzo przydatny wzór

Przykład
dla n = -1

Gdyż
pochodna cosinusa równa się minus sinus g(x) = cos(x)

Zwróćmy
uwagę jak wielką pracę wykonali matematycy. Musieli szukać takich
całek funkcji, których pochodne dają z powrotem funkcję
całkowaną. Wiele z tych poszukiwań to odgadnięcia, a sprawdzanie
odbywało się po przez podstawienie do wzoru na pochodną funkcji.
Pola
powieżchni funkcji
Zaczniemy
od wzorów przejścia z układu opisanego przez x i y -
(Kartezjańskiego do układu opisanego przez kąt fi i r promień -
(układ biegunowy)
Płaszczyzna

Odrazu
wykresy przygotowane są do pisania mikro wzorów. Zauważmy, że gdy
kąt fi bardzo mały, a taki przypadek rozpatrujemy pisząc mikro
wzory, wtedy łuk fi możemy w granicy gdy fi zmierza do zera
potraktować jako prostą.
Przestrzeń


Wzory
te można udowodnić logicznie z przedstawionego wyżej wykresu,
jednak nie jest to prosta sprawa w przypadku przestrzeni, która jest
opisana przez dwa kąty. Lepiej zrozumieć je raz i zapamiętać
aksjomatycznie.
Pola
powierzchni funkcji obrotowych
Drugi
sposób liczenia pola tomnożenie funkcji f(x) =y przez jej długość
łuku. Pełny kont obrotu wynosi 2*pi, wystarczy więc pomnożyć
y*d(L) przez tą liczbę a otrzymamy pole powierzchni obrotowej

W
pierwszym równaniu, wielkości pod pierwiastkiem pomnożyliśmy i
jednocześnie podzielliliśmy przez delta x kwadrat. Po wyciągnięciu
delta x kwadrat przed nawias i po dodaniu limesu gdy delta x zmierza
do zera, otrzymujemy końcowy wzór na pole powierzchni
obracanego równania okręgu. Oczywiście może to być dowolna
funkcja, na zdjęciu przedstawiliśmy równanie okręgu.
Pole
powierzchni równe jest
delta(s)
= (yi)*delta(L)

Stąd
w drugim równaniu na zdjęciu wzięło się yi. Popatrzmy jeszcze
raz na zdjęcie, gdy z delta(L) zmierzamy do zera otrzymamy Li w
punkcie, a suma tych punktów pomnożona odpowiednio przez yi da
nam pole powieżchni. Po dodaniu limesa do tej sumy, dostajemy
całkę i końcowy wzór. 2*(pi) jest obrotem i równa się pełnemu
obrotowi = 360 stopni. Pi jest liczbą = 3,14

y
prim - jest pochodną funkcji y.
Jeżeli
pominiemy 2*pi wtedy otrzymamy normalne pole, możemy więc napisać
równość

Wzory
na długości krzywych opisanych dowolną funkcją
Jeżeli
mamy teraz funkcje x i y zależne od b, gdzie b może np. oznaczać
czas, wtedy dzieląc i mnożąc wielkości pod pierwastkiem przez
delta(b) do kwadratu, oraz wyciągając (delta(b))^2 przed
pierwastek, otrzymamy dwa wzory na długości L:
pierwszy
podany wyżej i drugi zadany przez zmienną b.

To są
długości krzywych jedno i dwówymiarowe. Dodając kolejne sumy w
wyrzej opisany sposób otrzymamy długości krzywych w n -wymiarach.
To bardzowarzne ogólne wzory, podstawy. Z nich wyskakują wzory dla
poszczególnych przypadków.
Przykład
Długość
krzywej dwówymiarowej w układzie biegunowym


http://jakpowstajfraktale.blogspot.com/
Całka
powierzchniowa nie uwzględniająca obrotów

Jeżeli
w układzie biegunowym dana jest funkcja f(r) i porusza się ten
promień po kącie fi, wtedy pole zakreślone przez ten promień
wodzący wyraża się wzorem

gdzie
r = f(r). Tak,
że w tym przypadku możemy przyrównać poprzednie sposoby
obliczania pól do tego sposobu.
Dowód
Elementarna
powierzchnia o bokach a = r*d(fi) i b = d(r) ma powierzchnię

Przykład



Ja
Skorzystałem z serwera liczącego całki.
Jeżeli
pole powierzchni przedstawione powyższym wzorem obrócimy wokół
własnej osi wtedy otrzymamy wzór na pole powierzchni figur
obrotowych.
Pole płata na sferze

Patrzymy
na rysunek i układamy mikro równanie

Powyższy wzór wyprowadziliśmy błędnie. Oto poprawne rozwiązanie
Pole płata - układ kartezjański

Zauważymy, że Modół tego pola N jest równy
N = (Zx^2+Zy^2+1)^(0,5)
a delta s = N*delta(G)
gdzie delta(G) = d(x)*d(y) i jest elementarną powierzchnią. Jedynka we wzorze występuje dlatego, gdyż w kierunku Zx mamy wersor jednostkowy, liczymy pole nie objętość.
Iloczyn tego modułu N razy delta (G) = delta(S), a całka podwójna po d(x) i d(y) da pole powierzchni.

Pole
powierzchni figur obrotowych

Jest
to uogólniony wzór na powyższe pole, zmienna nie koniecznie musi
być kątem fi.
Przykład
Obliczyć
objętość torusa.






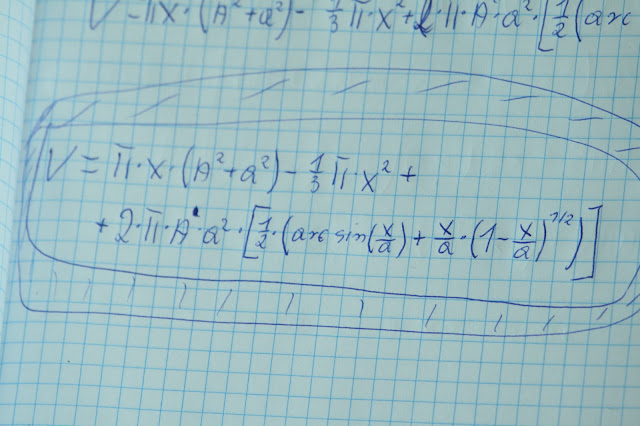
Przykład
Obliczyć
objętość ostrosłupa, którego tworzącą jest linia prosta f(x).





Innym
sposobem liczenia objętości jest całka podwójna , w której
wykorzystuje się elementarne pole d(G), wyprowadzone na samym
początku.

Zakładamy
tutaj, że f(r) = f(x,y).
Przykład
obliczyć objętość między dwoma okręgami danymi równaniami tak
jak na poniższym zdjęciu.

Szukana
objętość jest różnicą objętości większej danej pierwszym
równaniem i objętości mniejszej.
Liczymy
objętość pierwszą, oznaczymy ją A



Powinno
być

Trzeci układ to układ cylindryczny. wzory przjścia z x na r i fi wyglądają następująco.

Całka
potrójna w układzie cylindrycznym.
Układamy
wzór na mikro objętość, który po scałkowaniu da nam makro
objętość

Nie
będę udawał, że wiem skąd wzięła się we wzorze 1/3.
Prawdopodobnie stąd, iż r jest też w pośredni sposób zależne od
z. 2/3 wprowadziliśmy skutkiem rozwiązana równania, które
pokazuję niżej.
Przykład




Liczyliśmy
objętość kuli, a ta w każdym układzie powinna wynosić
V
= 4/3*pi*R^3
Stąd
pojawiła się konieczność wstawienia do wzoru 2/3. Tym samym
trzeba na ten wzór uważać, gdyż nie został wyprowadzony
logicznym ciągiem. fi oczywiście zmienia się od zera do pi.
Przepraszam za błąd.
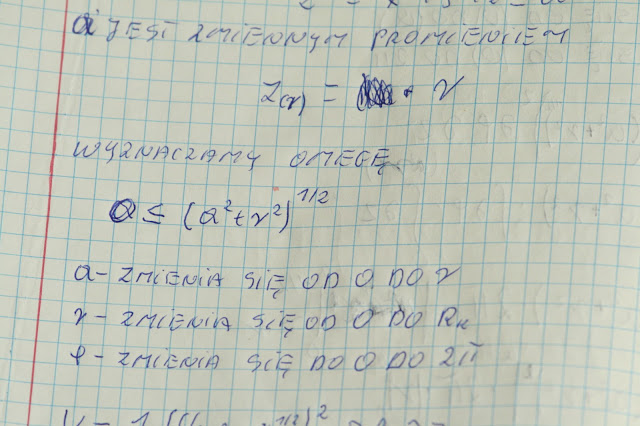
Całka
potrójna objętościowa w układzie sferycznym
Znów
układamy mikro równanie. Na rysunku składowe elementarnej
objętości zostały pokazane.

Gdy
scałkujemy po d(R) otrzymamy1 /3*R^3 za który jak to poprzednio
robiliśmy wstawiamy dowolną funkcję f(R) zależną od teta i fi.
Do
każdej całki powinienem doda stałą C. Przepraszam za tak poważny
błąd, jednak dopiero teraz to zrozumiałem i nie chce mi się od
nowa poprawiać prawie wszystkich zdjęć. Do każdej całki
koniecznie należy dodawać stałe, bez tego, gdy warunki początkowe
nie są zerowe, pominięcie tej stałej powoduje błędny
wzór!!!!!!!!!!!!!!!!!!!!.
Ani w
jednym ani w drugim wzorze niepowinno się całkować po d(r), przed
podstawieniem funkcji f(r). Idąc od samej góry powinno być




CDN.
Rachunek
Tensorowy
Rachunek Tensorowy
Wykład
przedstawiliśmy w formie zdjęć, najlepiej skopiować te zdjęcia
do komputera gdzie można je dowolnie powiększyć. Nie wdawaliśmy
się tutaj w szczegóły rachunku tensorowego, chodzi nam o pokazanie
samego sedna takiego rachunku. Ogólnie mówiąc tensor to tablica o
równej ilości kolumn i wierszy, gdzie są specjalne wzory, które
pozwalają wyliczyć taką tablicę. Nie wyprowadzaliśmy tego wzoru
jest on podany bez dowodu matematycznego, więc po prostu trzeba go
zapamiętać. Nie jest bardzo skomplikowany i przedstawiony jest na
zdjęciu poniżej.
Tensorem
nazywamy macierz (Tablicę) kwadratową o w-wierszach i k-kolumnach.
Rozwiązanie tej tablicy , inaczej zwane Jakobianem przejścia,
podaje wzór na ponższym zdjęciu. Przez det rozumiemy macież
powstałą po skreśleniu ktej kolumny i wutego wiersza, tak jak na
poniższym rysunku.

Przy
czym konwencja obliczeń jest prosta, mianowicie ustalamy kolumnę i
na tej kolumnie skreślami wiersze. We zorze zmieniamy kolejno numery
(w) od 1 do (k )



Zostawimy
wynik w te postaci, gdyż dojdziemy do bardzo ważnego wniosku.
Otóż gdy mamy tensor symetryczny, to znaczy taki w którym wyrazy
mieszane są sobie równe lub są równw zeru, a21=a12 wtedy
rozwiązaniem takiego tensora jest iloczyn wyrazów występujących
na przekątnej tensora. W znakomitej większości zagadnień
fizycznych mamy niezerowe wyrazy na diagonali pozostałe składowe
macierzy są tak małe, że można je pominąć. Gdy nie są małe
wtedy stosujemy wzur pokazany na zdjęciu pierwszym.
Oto
cała tajemnica rachunku tensorowego

Można
też wstawiać różniczki oznaczające bardzo małe przyrosty w
danych kierunkach



Do
tensora wstawiamy dowolne liczby i funkcje tak by osiągnąć
zamierzony cel. W zagadnieniu trzech ciał tablica przestaje być
symetryczna.

Mamy
nadzieję, że udało Nam sięwytłumaczuć tachunek tensorowy w
zrozumiały spsób.
Można się wspomódz stroną podaną niżej, jest świetna.
http://pl.wikibooks.org/wiki/Metody_matematyczne_fizyki/Metody_matematyczne_fizyki
Życzymy dobrej zabawy.
Można się wspomódz stroną podaną niżej, jest świetna.
http://pl.wikibooks.org/wiki/Metody_matematyczne_fizyki/Metody_matematyczne_fizyki
Życzymy dobrej zabawy.
To
prawdopodobnie kończy nasz kurs matematyki połączonej z fizyką,
dla Was.
Jednak
zdecydowaliśmy się kontynuować. To nasz ostatni wpis w tym blogu.
Natrafiliśmy na coś co bardzo ułatwi wam życie.
Równanie
różniczkowe drugiego rzędu i n-tego rzędu. Ogólne rozwiązanie
równań różniczkowych n-teg rzędu o współczynnikach stałych.
Ogólnym
rozwiązaniem tego typu równań różniczkowych jest funkcja
Trzeba
sobie przypomnieć dział matematyki dzielenie wielomianu przez
wielomian, gdyż r występuje w takiej potędze, jak rząd równania
różniczkowego. Dla równania różniczkowego trzeciego rzędu r
będzie w trzeciej potędze co oznacza trzy rozwiązania. Tą
uniwersalność zawdzięczamy własności funkcji potęgowej y =
e^(r*x), a ściślej jej pochodnej, której wzór wygląda
następująco. Stałe q i P nie można uzmienniać, tym samym
oznaczają dowolne stałe nie zależne od x.
Dowód
dla równania różniczkowego drugiego rzędu
a
Można
by bardzo łatwo sprawdzić czy wzór powyższy zachodzi dla
uzmiennionych stałych, ale każdy czytelnik zrobi to we własnym
zakresie.
Twierdzenie
Suma
poszczególnych rozwiązań równania różniczkowego jest też
rozwiązaniem tego równania.
Dalszy
dowód leży w zakresie czytelnika. Jest łatwy wystarczy podstawić
rozwiązanie do równania różniczkowego, różniczkujemy je dwó i
jednokrotnie. Jeżeli rozwiązanie jest poprawne powinniśmy otrzymać
- lewa strona równa prawej – stronie równania.
Cdn.
Bardzo przydatne wzory
Są
to bardzo ważne wzory, bez nich nie sposób wyobrazić sobie
rozwiązywania skomplikowanych równań matematycznych. Choć
rozwinięcia w szereg nie dają dokładnych wyników to jednak można
wziąć dowolną liczbę sum danego wzoru i otrzymać wynik z
dowolną dokładnością.
Pierwszy
wzór nie wiemy kto wyprowadził
Drugi
wzór to szereg Maclarena, opiera się na sumie pochodnych funkcji.
liczba a jest punktem wokół którego rozwijamy funkcję, prawie
zawsze jest to zero lub jeden.f(a)" oznacza wartość pochodnej
po podstawieniu liczby a za x. Za e^x podstawiamy dowolną funkcję
f(x).
Kto
wyprowadził trzeci wzór, też nie wiemy.
Równania
filis - kołowe zamknięte
Wychodząc
z definicji pochodnej, (została opisana w posście (Tor Ruchu
Meteorytów Spadających Na Słońce) otrzymujemy dla dowolnej
funkcji wielkość, którą nazwaliśmy Delta Alfa
Przy
wyprowadzeniu tej wielkości posłużymy się trójmianem
kwadratowym.
d(f(x))/d(x)=(2*a*x*(delta.x)+a*(delta.x)^2+b*(delta.x))/d(delta.x)

z
rysunku widać, że
delta.x=(x2)-(x1)=d=d(f(x))/(d(x)*dx)
Zauważmy,
że w przybliżeniu
(delta.x)^2=(delta.x)^2=(d(f(x))/(d(x)*d(x)))^2
i
2*a*x*d(f(x))/(d(x)*d(x))=d(f(x))/d(x)*d(f(x))/(d(x)*d(x)
oraz
b*(delta.x)=(d(f(x)/d(x))/(d(f(x))/(d(x)*dx))
Stąd
(delta.alfa)=(((d(f(x))/(d(x)*d(x))*d(f(x))/(d(x)*d(x)))+(d(f(x))/(d(x)*d(x)))^2+((d(f(x)/d(x))/(d(f(x))/(d(x)*dx)))/((d(f(x))/d(x)))
To był
osobny temat
Teraz
wyliczamy sinus i kosinus, w tym celu znów korzystamy z definicji
pochodnej dla funkcji kwadratowej podanej wyżej.
d(f(x))/d(x)=(2*a*x*(delta.x)+a*(delta.x)^2+b*(delta.x))/d(delta.x)
Zauważmy, iż w liczniku mamy składowe wektora z (w1) i (w2)), wektor W3 =(delta.x)^2 pominiemy jako bardzo mały.
(W2)^2=(2*a*x*(delta.x))^2=4*a^2*x^2*(delta.x)=(f(x)*(d(f(x))/(d(x)*d(x)))^2
(W2)=d(f(x))/d(x)*d(f(x))/(d(x)*d(x)
(W1)^2=(a*(delta.x)^2)^2=(d(f(x))/(d(x)*d(x))^2)^2
(W1)=(d(f(x))/(d(x)*d(x))^2
Znów
korzystamy ze słynnego równania Pitagorasa (często pojawia się w
naszych postach).

(Ww)=((W1)^2+(W2)^2)^(1/2)=(f(x)*(d(f(x))/d(x))^2+(d(f(x))/(d(x)*d(x))*d(f(x))/d(x))*((d(f(x))/d(x)))^2)^2)(1/2)
sin.u(alfa)=(W1)/(Ww)=(d(f(x))/d(x)*d(f(x))/(d(x)d(x))/((d(f(x))/(d(x)d(x))^2)^2+(d(f(x))/(d(x)d(x))^2)^2)^(1/2)
cos.u(alfa)=(W2)/(Ww)=(d(f(x))/(d(x)d(x)))/((d(f(x))/(d(x)d(x))^2)^2+((df(x)/dx)^2*(d(f(x))/(d(x)d(x)))^2)^(1/2)
(delta.alfa)=(((d(f(x))/(d(x))*d(f(x))/(d(x)d(x)))+((d(f(x))/(d(x)*d(x))/((d(f(x))/(d(x)dx))
Oto trzy bardzo ważne dla nas równania
Nie jest to zwykły sinus i kosinus, lecz uniwersalny zawierające w sobie sinus i kosinus zwykły.
Stałą b pomijamy gdyż przesówa tylko ona delta.x
(W2)^2=(2*a*x*(delta.x))^2=4*a^2*x^2*(delta.x)=(f(x)*(d(f(x))/(d(x)*d(x)))^2
(W2)=d(f(x))/d(x)*d(f(x))/(d(x)*d(x)
(W1)^2=(a*(delta.x)^2)^2=(d(f(x))/(d(x)*d(x))^2)^2
(W1)=(d(f(x))/(d(x)*d(x))^2
cos.u(alfa)=(W2)/(Ww)=(d(f(x))/(d(x)d(x)))/((d(f(x))/(d(x)d(x))^2)^2+((df(x)/dx)^2*(d(f(x))/(d(x)d(x)))^2)^(1/2)
(delta.alfa)=(((d(f(x))/(d(x))*d(f(x))/(d(x)d(x)))+((d(f(x))/(d(x)*d(x))/((d(f(x))/(d(x)dx))
Oto trzy bardzo ważne dla nas równania
Nie jest to zwykły sinus i kosinus, lecz uniwersalny zawierające w sobie sinus i kosinus zwykły.
Stałą b pomijamy gdyż przesówa tylko ona delta.x
(W2)^2=(2*a*x*(delta.x))^2=4*a^2*x^2*(delta.x)=(f(x)*(d(f(x))/(d(x)*d(x)))^2
(W2)=d(f(x))/d(x)*d(f(x))/(d(x)*d(x)
(W1)^2=(a*(delta.x)^2)^2=(d(f(x))/(d(x)*d(x))^2)^2
(W1)=(d(f(x))/(d(x)*d(x))^2

Dzieląc
sinus przez kosinus otrzymujemy
tg(alfa)=d(f(x))/d(x)
Co
należało udowodnić
Weźmy
dla przykładu wzór pracy
W =
F*S*cos(alfa)
Ponieważ
działa sił więc mamy do czynienia z ruchem jednostajnie
przyśpieszonym
S(t)
= 0,5*a*t^2
przyśpieszenie
i siła są stałe więc naszą fynkcją jest f(x)=S(t)
wyliczając
pochodną i wstawiając do wzoru na cosinus otrzymamy równanie
omegę to znaczy zamknięte, zawierające w sobie wszystkie możliwe
kosinusy, czyli równanie w przestrzeni możliwości.
W
= F*S*[SUMMA(i=0 ; 00 )(1/(1+(0,25*a*t(i))^2)^0,5)]
Rachunek operatorów różniczkowych
Rozróżniamy następujące typy operatorów



Operator Nabla daje współrzędne wektora a Laplasjan długość wektora. Łatwo to udowodnić stosując rachunek wektorów, który znajdziecie w tym blogu.

Następnymi bardzo ważnymi operacjami na tych operatorach jest
Rotacja z dywergencji
Dywergencja z dywergencji czyli przenikanie jest iloczynem skalarnym dwóch operatorów Nabla a rotacja iloczynem wektorowym dywergencji. Teraz dwa ważne prawa
I
Rotacja z dywergencji równa się zero

Udowadniamy tą zależność rachunkiem tensorowym, który znajdziecie w tym blogu- Rachunek tensorowy.
II
Dywergencja z rotacji równa się zeru.

Wzór na rotację, który wyprowadzamy z rachunku tensorowego znajdziecie w artykule - Równania Maxwella podstawą teorii pola. Dipol elektryczny. Natężenie pola elektrycznego w odległości r od dipola. Zasada działania radia

policzymy tutaj natężenie pola elektrycznego E w odległości R od niego w punkcie P.Dipol drgający został umieszczony w postaci naładowanego pręta w kartezjańskim układzie współrzędnych wzdłuż osi Z. Korzystamy z zależności

Tutaj potencjał oznaczyliśmy po przez symbol fi, może bardziej szczęśliwe było by oznaczenie klasyczne U. Calka z pola eletrycznego jest potencjałem, więc skoro pochodna jest odwrotnością całki więc pochodna potencjału U daje pole elektryczne E.
Należy teraz określić potencjał pola elektrycznego fi w punkcie P. Tutaj zadanie jest proste gdyż potencjał ten jest różnicą potencjałów wynikających z odległości r1 = [0,0,-d/2] i r2 = [0,0,d/2], są to współrzędne r1 i r2. Innymi słowy to środek pręta znajduje się w układzie współrzędnych uczyniliśmy tak po to by zapewnić symetrię.

Kąt teta pokazany na rysunko jest kątem między osią Z a płaszczyzną X,Y.. Na tej płaszczyźnie został umieszczony środek dipola.. Wobec tego wypadkowy potencjał w punkcie P wynosi

Dla dużych odległości od dipola wielkość d^2/(4*r^2) jest tak mała, że możemy ją pominąć. Wyrażenie pod pierwiastkiem przybiera więc postać

Wobec tego wzór na wypadkowy potencjał w punkcie P przybiera postać

Następnie stosujemy przybliżenie pierwsze równanie na poniższym zdjęciu

Dla durzych r znowu człon w nawiasie możemy pominąć, więc ostatecznie wzór na potencjał w punkcie P, przybiera postać

Gdzie
P = Q*d _ moment dipolowy
d- rozmiar dipola
Q ładunek na dipolu
ponieważ Z/r = cos(teta), więc potencjał w punkcie P określony za pomocą r i teta ma postać

Pole elektryczne w odległości P od drgającego dipola
Chcąc policzyć pole elektryczne w punkcie P wracamy do wzoru określającego zależność pola elektrycznego od pochodnej potencjału. Parę zdjęć wyżej

Jest to wzór określający natężenie pola elektrycznego E w podległości r od drgającego dipola wyrażony za pomocą r - odległości i kąta teta
Chcąc policzyć pole elektryczne na osiach x,y,z wracamy do równania w postaci



Dla składowej Ez wykorzystaliśmy wzór na pochodną iloczynu dwóch funkcji>
Należy pamiętać, że te wzory są słuszne dla dużych r w porównaniu z rozmiarami dipola d. To koniec zadania , jak te wiadomości wykorzystać
Załużmy, że znamy odległość nadajnika radioewego i znamy też wzór określający zmianę pola elektrycznego, może to być przykładoeo
E = E0*cos(omega*T)
Wracamy teraz do równania Maxwela , znajdziecie je w tym blogu

Wzór na rotację też podaliśmy w tym blogu>
Licząc rotację a później całkując po czasie T powyższe równanie na E można policzyć pole B a następnie korzystając z prawa Ampera można policzyć natężenie prądu , który wyindukuje się w cewce radiowej

L - długość przewodnika cewki radiowej
Znając tą wartość można skonstruować wzmacniacz, który pozwoli nam słuchać audycji radiowych.
Prawo Biota-Savarta
W artykule Dipol elektryczny wyprowadziliśmy wzór na natężenie pola elektrycznego w odległości r od przewodnika. Przypomnimy ten wzór

Podstawiając za Q - ładunek wartość taką jak pokazaliśmy poniżej i obnirzając potęgę o jeden - to konieczność gdyż pole magnetyczne zależy od odwrotności odległości od źródła, otrzymamy

Otrzymujemy wzór na pole magnetyczne B w odległości r od przewodnika. Związek między ładunkiem a natężeniem prądu jest aksjomatem więc trzeba się tego nauczyć na pamięć. Pamiętajmy, że pole elektryczne E opisują ładunki Q a pole magnetyczne B natężenia prądów I. Zamieniając je tak jak pokazaliśmy wyżej otrzymujemy od razu wzory na pola odpowiednio E i B. Ponieważ dodaliśmy wielkość o wymiarze 1[m], wersor choć jednostkowy to jednak ma wymiar musimy podnieść r o jedną potęgę, to samo z polem elektrycznym.

Przechodząc do bardzo małych zmian i rozmiar dipola d zamieniając na bardzo małą zmianę przewodnika dL otrzymamy

Dalej z rachunku iloczynów wektorowych wiemy, że

Dodając więc wersor r pozbędziemy się sinusa, w ten sposób otrzymamy prawo Biota - Savarta w książkowej postaci.

Równanie falowe Równania Maxwela
Równanie takie wyprowadza się z równań Maxwela, na początek weźmy dwa z nich w postaci różniczkowej

Wprowadzimy pole A takie, że
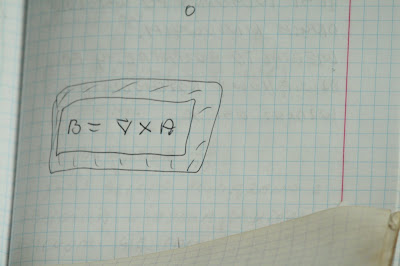
Jest ono dowolne, a jedynym warunkiem jest to by jego całka równała się B. Z pierwszego równania otrzymujemy

Dla sumy takich pól możemy wprowadzić stały potencjał skalarny fi. Ponieważ mamy poprawej stronie równania zero więc korzystamy z rachunku pochodnych - Pochodna ze stałej równa się zero. Otrzymujemy w ten sposób

 To równanie może posłużyć do wyprowadzenia równania falowego jednak to zostawiamy karzdemu czytelnikowi jako ćwiczenie. My tutaj wyprowadzimy równanie falowe na podstawie czwartego równania Maxwella
To równanie może posłużyć do wyprowadzenia równania falowego jednak to zostawiamy karzdemu czytelnikowi jako ćwiczenie. My tutaj wyprowadzimy równanie falowe na podstawie czwartego równania Maxwella



Dla jasności dodamy, że

Rachunek tensorów, bo z nim mamy do czynienia znajdziecie w tym blogu.
Przykład z propagacją fali dźwiękowej w ośrodku sprężystym. Prędkość rozchodzenia się fali
Zauważymy, że operator różniczkowy

jest pochodną po współrzędnych liniowych. Wiedząc to rozpatrzmy falę rozchodzącą się wzdłuż osi x, równolegle do podłoża. Założymy jeszcze dla uproszczenia rachunków, że źródło fali znika po zadziałaniu a prpagacja fali zachodzi bez strat energetycznych. Rozpatrujemy wtedy równanie typu.

W danym ośrodku prędkość fali jest stała więc mamy równanie różniczkowe zerowego rzędu. Załużmy teraz ,że falę opisuje wzór, jest zgodny z rzeczywistością.

Niech teraz k będzie przedstawione jak na zdjęciu poniżej, sinusy i kosinusy zostały pominięte jako bardzo małe. Wyliczając pochodne względem x i t otrzymujemy



Zależność masy fali od masy ośrodka ciężko nam ująć we wzór zostawiamy to tęższym głową. Gęstość fali to masa tej fali zawarta w jej 1/2 długości lambda
Wyszła nam zależność odwrotnie proporcjonalna do gęstości a powinno być na odwrót, im większa gęstość tym większ prędkość fali. Można to łatwo skorygować, widać z powyższych równań, że prędkość fali jest odwrotnie proporcjonalna do k, należy przyjąć k takie jak na poniższym zdjęciu wtedy prędkość fali stanie się wprost prporcjonalna do gęstości

To teraz poprawna zależność Jednak pokusimy się o wyprowadzenie głębszej zależności. Gęstość fali to stosunek jej masy do zawsze stałej objętości tej fali. Masa zawarta w połówce fali w całości jest równa masie ośrodka, choć sama masa zmienia się jak cosinus alfa. Więc wzór na prędkość fali przybiera postać

Dla ciał stałych skorzystamy z zależności energii od ciśnienia

Ogólnie wzór na prędkość przybiera postać

w ciałach stałych energia fali wynikająca z ciśnienia i objętości , musi być równa energii elektrostatycznej, którą wytwarzają elektrony krążące na końcowych orbitach atomowych tworzące wiązania sieci krystalicznej. W tym przypadku Q jest ładunkiem elektronów a N jest liczbą elektronów brakujących do całkowitego obsadzenia orbity

Liczba 8 wzieła się z podstawienia za lambda , 1/2*lambda. jedna druga podniesiona do potęgi trzeciej daje jedną ósmą.
n - jest liczbą moli ciała stałego
k - jest stałą Boltzmana
T - jest temperaturą ciała stałego
k0 - stałą elektryczną
r.at-jest promieniem atomu do pierwszej nieobsadzonej do końca orbity
Dla cieczy sprawa jest prosta. Podstawiamy ciśnienie baryczne

Gdzie
q - gęstość cieczy lub gazu
g - przyśpieszenie planetarne
h - wysokość słupa cieczy
n - jest liczbą moli
k - jest stałą Boltzmana
T - jest temperaturą
Dla gazów należy podstawić P zmieniające się wraz z wysokością, łatwo znajdziecie je w internecie. Liczbę moli n liczymy ze wzoru

Gdzie
M.oś - masa ośrodka w którym rozchodzi się fala
m.at. - masa atomu wchodzącego w skład ośrodka
Długość fali do trzeciej potęgi daje objętość, która pomnożona przez gęstość ośrodka daje masę fali, zaś masa fali równa jest masie ośrodka. Otrzymujemy więc wzór

m - masa ośrodka w którym rozchodzi się fala.
Jest to nasze rozwiązanie być może niezbyt eleganckie gdyż wchodzi w nie długość fali. Istnieją rozwiązania pomijające tą wielkość
Prędkość i praca cząstek w gazach

Obliczamy ciśnienie wywierane przez cząstki na ścianki naczynia. Ponieważ cząski poruszają się chaotycznie, więc 1/3 cząstek będzie uderzała o każdą z par ścianek sześcianu. Cząstka zderzając się sprężyście dozna zmiany pędu
Zmiana pędu ciała jest równa pędowi siły
 Czas przelotu między ściankami policzymy ze wzoru na prędkość
Czas przelotu między ściankami policzymy ze wzoru na prędkość
 Ponieważ cząska porusza się tam i zpowrotem więc droga L = 2*L
Ponieważ cząska porusza się tam i zpowrotem więc droga L = 2*L
Otrzymujemy więc układ równań
 Dzielimy teraz obydwie strony równania przez powieżchnię ścianek by otrzymać ciśnienie
Dzielimy teraz obydwie strony równania przez powieżchnię ścianek by otrzymać ciśnienie
 Jak wcześniej wspomnieliśmy 1/3 cząstek uderza w każdą parę ścianek, więc otrzymujemy wzór końcowy na ciśnienie uwzględniając, że pole powierzchni S razy odległość między ściankami L daje objętość sześcianu
Jak wcześniej wspomnieliśmy 1/3 cząstek uderza w każdą parę ścianek, więc otrzymujemy wzór końcowy na ciśnienie uwzględniając, że pole powierzchni S razy odległość między ściankami L daje objętość sześcianu

 Rozwiązując pierwsze równaie na zdjęciu względem v otrzymujemy wzór na prędkość cząstek gazu
Rozwiązując pierwsze równaie na zdjęciu względem v otrzymujemy wzór na prędkość cząstek gazu
 Jest to bardzo zgrabne równanie, znając ciśnienie i gęstość gazu możemy policzyć prędkość cząstek a co za tym idzie i ich temperaturę korzystając ze wzoru
Jest to bardzo zgrabne równanie, znając ciśnienie i gęstość gazu możemy policzyć prędkość cząstek a co za tym idzie i ich temperaturę korzystając ze wzoru
P*V = n*R*T
gdzie
n- liczba moli gazu
V-Objętość naczynia
T - Temperatura gazu
R - Stała Rytberga = 8,31 [J/stopień] Praca wykonana nad gazem
Przenosząc objętość na lewą stronę równania otrzymujemy zależność
P*V = E(k.śr)
Ponieważ energia jest równoważna pracy więc
Policzymy pracę dla premiany izobarycznej to znaczy takiej gdzie ciśnienie jest stałe a zmieniamy objętość. Oznacza to, że otoczenie doskonale odbiera temperaturę z naczynia z gazem, to znaczy temperatura też stała, tylko wtedy spełniony jest warunek stałości ciśnienia
Ponieważ zmieniamy objętość więc poniższe równanie całkujemy po objętości. Konieczna jest znajomość racunku całkowego oraz rachunku logarytmów. Wszystko to znajdziecie w tym blogu.



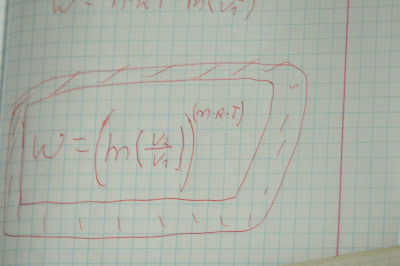 Jest to praca na n molach gazu
Jest to praca na n molach gazu
Pracę na jeden mol gazu otrzymamy dzieląc powyższe równanie przez n
 Też bardzo zgrabne równanie. Powinno być przed całością razy 1 [J]
Też bardzo zgrabne równanie. Powinno być przed całością razy 1 [J]
Zapomnieliśmy dodać stałą całkową C. Z warunków początkowych otrzymujemy V1=V2, gdyż na początku nie wykonano pracy.
 We wzorze na pracę po prostu tej jedynki niezapisaliśmy, jednak stale należy o niej pamiętać, gdyż ma wymiar energii. otrzymujemy ln(1) po czym korzystamy z aksjomatu sumy logarytmów
We wzorze na pracę po prostu tej jedynki niezapisaliśmy, jednak stale należy o niej pamiętać, gdyż ma wymiar energii. otrzymujemy ln(1) po czym korzystamy z aksjomatu sumy logarytmów
Budowa i zasada działania transformatoraj

Transformator składa się z dwóch uzwojeń, pierwotnego Z1 i wtórnego Z2, Połączonych frromanetykiem, który spełnia rolę przewodnika pola magnetycznego B. Przepływ prądu zmiennego w cewce Z1 powoduje indukcję pola magnetycznego, które jest przewodzone przez ferromagnetyk, innymi słowy ferromagnetyk drga tym wyindukowanym polem magnetycznym. Ponieważ drga cały więc te drgania w cewce Z2 powodują indukcję prądu o natężeniu I2. Indukcję prądu przez zmienny prąd opisaliśmy tutaj
http://jakpowstajfraktale.blogspot.com/2012/03/prawa-naturalne-fizyka-w-piguce-dla.html

Załóżmy teraz, że ustalamy długość przewodnika cewki a zmieniamy tylko pole powierzchni, Zauważmy przy tym, że pole powieżchni delta s razy długość przewodnika daje objętość przewodnika. By nie doszło do rezonansu w kondensatorze, móże być on konstruktywny bąź destruktywny, ustala się taką samą objętość dwóch cewek po przez odpowiedni dobór średnicy przewodnika, zyskuje się tym sposobem różnicę w ilości uzwojeń n. Rozwiązując powyższy układ równań względem I oraz pamiętając, że objętości dwóch cewek są sobie równe oraz czasy delta t drgań są takie same otrzymujemy

Dzieląc I1 i I1 przez siebie otrzymujemy klasyczny wzór zwany przełożeniem transformatora. Przez pomyłkę pomineliśmy delta t na powyższym zdjęciu, jednak skoro są równe to i tak się skracają

Wyprowadzenie prawa Ampera - Prawo Ampera

Prąd o gęstości j płynie przez przewodnik wzdłuż osi Z. Związek między gęstością a natężeniem prądu został pokazany na poniższym zdjęciu. Jest to prawo aksjomatyczne trzeba zrozumieć i zapamiętać.

Korzystamy z pierwszego równania Maxwella

Całka i operator różniczkowy dywergencji znoszą się, gdyż całkowanie jest odwrotnością różniczkowania, nie wolno tak robić w przypadku rotacji. Otrzmujemy więc równanie na natęrzenie pola elektrycznego E

Po uwzględnieniu wzoru na Q otrzymujemy

Drugie równanie na zdjęciu pokazuje związek między potencjałem i polem elektrycznym E. Później zrozumiecie po co liczymy tą wielkość. Dalej mamy

W artykule- Równanie falowe i prawa maxwela - wprowadziliśmy pole A którego rotacja daje pole magnetyczne

Tutaj wyprowadzone pole fi jest właśnie odpowiednikiem pola A i stanowi jego potencjał tak jak V jest potencjałem pola elektrycznego E. Jest to bardzo warzny wzór, nauczciesię dobre sposobu wyprowadzenia, Tak więc pole magnetyczne B jest rotacją pola potencjalnego fi.

Przypomnimy tutaj operator rotacji, Oprator rotacji od dywergencji różni się tylko iloczynami, pierwszy jest iloczynem skalarnym drugi iloczynem wektorowym, to daje olbrzymią różnicę. Wzór na rotację otrzymuje się z rachunku tensorowego, który znajdziecie w naszym blogu, wzory na dywergencje i rotację pola podaliśmy terz w artykule- Równania Maxwella podstawą teorii pola- Też znajduje się w tym blogu< oto wzór na rotację

We wzorze tym na przykład f(z) - oznacza, że składową zetową pomijamy we wzora, pozostaje tylko x i y.
Ponieważ prąd płynie tylko po składowej Z Więc niezerowe rozwiązanie istnieje tylko dla składowej fi(z), wszystkie inne sięzerują pokazaliśmy to na poniższym zdjęciy. Pamiętajmy , że ze wzoru na
r^2= x^2+y^2+z^2
składową z^2 odrzucamyzostaje więc pocodna po y i po x tylko z równania
r^2 = x^2+ y^2


Korzystając z twierdzenia logarytmów 1/2 wynosimy przed logarytm i stosujemy wzór na pochodną funkcji złożonej. Mając składowe Bx, By,, Bz, korzystamy z twierdzenia Pitagorasa, które da nam wypadkowy wektor B pola magnetycznego


Przenosząc L na lewą stronę równania i przechodząc z l na d(L), otrzymamy klasyczne prawo Ampera w postaci całkowej

d(L) - jest dowolną krzywą przedstawioną dowolnym wzorem, może być to po prostu L lub np. L*ln(L)
Zauważmy, że przenikalność próżni razy prędkość światła do kwadratu daje przenikalność magnetyczną próżni, ściślej jej odwrotność. Jeżeli przeniesiemy 2*pi na lewą stronę wtedy otrzymamy całkę obrotową, która jest ostateczną postacią prawa Ampera

Pierwsze i drugie prawo Keplera
I prawo Keplera
Ruch planet odbywa się po torach eliptycznych, gzie w jednym z ognisk elipsy leży Słońce.
II prawo Keplera
Promień wodzący planety zakreśla w równych odstępach czasu równe pola. Inaczej mówiąc prędkość polowa planet jest stała.
Dowód drugiego prawa Keplera
Prędkość polowa będzie zmianą pola zakreślonego przez planetę do czasu w którym to ple zostało zakreślone. Rysujemy wykres i układamy mikro równanie
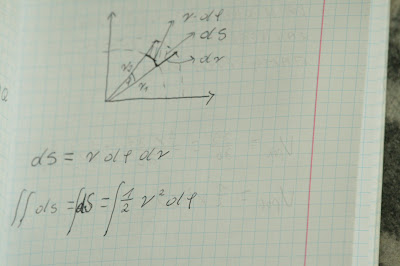
Ponieważ jak widać na poniższym zdjęciu chodzi nam o dS, więc wielkość tą wyciągamy spod całki.

Skorzystamy teraz z prawa zasady zachowania momentu pędu L


Widać, że prędkość polowa zależy tylko od momentu pędu L, który jest stały, więc i prędkość polowa jest stała, co należało udowodnić
Dynamika relatywistyczna - Wyprowadzenie wzoru na przyśpieszenie relatywistyczne
W dynamice relatywistycznej często występuje wielkość, nadano jej osobny symbol

I tak droga, czas i masa transformują się według wzorów, im v bliższe prędkości światła c tym wyraźniejsze efekty relatywistyczne

Więcej na ten temat znajdziecie w tym blogu
Żeby określić przyśpieszenie relatywistyczne posłużymy się wzorem

Ponieważ gamma zależy od prędkości więc stosujemy wór na pochodną iloczynu funkcji

Dalej przyglądnijmy się członowi tego równania

Dalej pomnożymy ten człon i podzielimy przez prędkość światła do kwadratu


Dalej łączymy obydwa człony

Podzielimy teraz obydwie strony równania przez m otrzymując w ten sposób przyśpieszenie relatywistyczne

Energiia relatywistyczna - Wyprowadzenie wzoru
By określić energię relatywistyczną rozpatrzmy równanie zmiany tej energii w czasie. Łatwo sprawdzić, że pochodna energii po czasie równa się sile pomnożonej przez prędkość.

Wyliczamy d(E) po przez rozdzielenie zmiennych

Stosujemy teraz wzór na całkę iloczynu dwóch funkcji, łatwo znajdziecie go w internecie. Wgląda to następująco

Czasy skróciły się więc całkujemy po prędkości.Całka ta daje energię kinetyczną, zapiszmy ją w postaci energii całkowitej a jej wartość będzie zależna od zmiany gama a ściślej wchodzącej w jej skład wielkości beta


Skorzystamy teraz z twierdzenia Pitagorasa, współrzędne skalara energii podniesione do kwadratu dadzą wypadkowy skalar.

Otrzymaliśmy wzór na energię relatywistyczną, a wzór na pęd relatywistyczny otrzymamy rozwiązując pierwsze równanie względem P.

Są to wzory różniące się od oficjalnie przyjętych. Czy są poprawne tego nie wiemy. Proponujemy tę nieścisłość wyjaśnić na wykładach.
Wyprowadzeniewzorów na liczbę zderzonych cząstek, Kąt bryłowy rozproszenia cząstek, Przekrój czynny na zderzenie cząstek - Przeszkody. Przekrój czynny Rutherforda
Liczba zderzonych cząstek w przeszkodzie
Prawdopodobieństwo zderzenia cząstki z atomem przszkody jest określony aksjomatycznie w postaci

Następnie wprowadzimy pojęcie średniej drogi swobodnej cząstek w przeszkodzie którą przebędzie cząstka w przeszkodzie zanim dojdzie do jej zderzenia z atomem przeszkody

Przenosząc na prawą stronę fi zero i uwzględniając wzór na średnią drogę swobodną otrzymujemy

Liczba zderzonych cząstek N jest równa różnicy strumienia cząstek przed przeszkodą i za przeszkodą

Z definicji aksjomatyczej średniej drogi swobodnej otrzymujemy


Wyprowadzenie wzoru na kont bryłowy prawdopodobieństwa rozproszenia zderzonych cząstek w przeszkodzie.

Prawdopodobieństwo rozproszenia w kąt bryłowy omega jes aksjomatycznie określony następująco

Wyprowadzenie wzoru na przekrój czynny atomów przeszkody
Można też kąt bryłowy prawdopodobieństwa zdefiniować następująco

Stąd zmiana przekroju czynnego wynosi

Dalej należy określić przekrój czynny zależny od strumienia fi i prędkości cząstek padających na przeszkodę. Można wykorzystać w tym celu wcześniej wyprowadzony wzór na liczbę N zderzonych cząstek, jednak możemy rozpatrzyć problem bardziej dokładnie. W tym celu zastosujemy zasadę zachowania momentu pędu rozproszonych cząstek i wprowadzimy promień b zwany parametrem zderzenia, Wystarczy spojrzeć na pierwszy rysunek i zamiast R dopisać sobie b , który będzie się zmieniał w zależności od gęstości strumienia cząstek padających na przeszkodę i w zależności od ich prędkości.



 ,br>
Zauważmy następnie, że zmianie b o d(b) musi towarzyszyć zderzenie co pomnożone przez grubość przeszkody x da liczbę jąder w przeszkodzie, b*d(b) po to by po scałkowaniu otrzymać pole powierzchni.
,br>
Zauważmy następnie, że zmianie b o d(b) musi towarzyszyć zderzenie co pomnożone przez grubość przeszkody x da liczbę jąder w przeszkodzie, b*d(b) po to by po scałkowaniu otrzymać pole powierzchni.
Zmianę liczby zderzonych cząstek w zależności od ich prędkości możemy określić w następujący sposób



W ten sposób otrzymaliśmy wzór na przekrój czynny zależny od gęstości strumienia cząstek padających na przeszkodę wyrażony za pomocą prędkości tych cząstek, Inaczej wany Przekrojem czynny Rutheforda
Fizyka jądrowa. Wyprowadzenie wzoru na liczbę stanów kwantowych, pęd i energię i siłę jądrową- jądra atomowego.
Znajdziemy tutaj wzory na liczbę stanów kwantowych, pęd i energię- jądra atomowego w zależności od liczby N nuklidów - protonów i neutronów- i promienia R tego jądra.
Jak wiemy z elektrostatyki dwa jednakowe ładunki odpychają się, jednak gdy zbliżyć je do siebie na odpowiednią odległość, wtedy do głosu dochodzą silniejsze siły przyciągające, zwane siłami jądrowymi. Jej energia jak się dalej przekonamy, zależy tak jak dla ładunków odwrotnie od promienia jądra, jednak zamiast ładunku istnieje masa protonu w mianowniku, co determinuje ogromną energię wiązań jądrowych..
Wraz ze wzrostem promienia jądra, energia ta maleje gdyż masa nukleonu jest ustalona. Tym samym sytuacja jest niemal odwrotna niż w elektrostatyce, w niej ładunki się sumują a suma ta jest podniesiona do kwadratu gdy chodzi o energie i siły. Skutkiem tego siły jądrowe choć o wiele wiele potężniejsze od elektrostatycznych, mają bardzo krutki zasięg.
Wyprowadźmy teraz wzór na tą energię. W tym celu wykożystamy postulat Bohra

gdzie n jest kwantem, liczbą całkowitą o którą mogą zmieniać się momenty pędów elektronów krążących po orbitach atomowych. założymy teraz, że w jądrach atomowych jest tak samo, czyli liczba możliwych pędów neutronów i protonów w jądrze jest też skwantowana..
Dalej będziemy rozpatrywać objętość przestrzeni pędów i wielkości liniowych, to konieczne, gdyż całkowita liczba możliwych pędów tworzy pewną przestrzeń. W tym celu równanie Bohra podniesiemy do trzeciej potęgi.

n - niepodnosimy do trzeciej potęgi, gdyż liczba możliwych stanów w przestrzeni jest dalej n.
h^3 - daje sześciowymiarową przestrzeń we współrzędnych, Px,Py,Pz i w przestrzeni liniowej, x,y,z.Stąd łatwo wyliczyć n - możliwą liczbę stanów jądra.

Dalej z zasady Pauliego wiemy, że jeden stan mogą obsadzić dwa nuklidy o przeciwnych stanach, powyższy wzór przedstawia taką sytuację, więc dzieląc ten wzór przez 2 otrzymamy ilość protonów i neutronów w jądrze.


Jest to wzór na pęd w zależności od liczby protonów i neutronów w jądrze. Dalej zauważymy, że

gdzie r0 - promień protonu lub neutronu. Podstawiajć to otrzymujemy

Podstawiając ten pęd do wzoru na energię mamy dalej końcowy wzór

Pamiętajmy, że pochodna energii po drodze daje siłę, tutaj trzeba policzyć pochodną po d(r) i d(N) W tym celu trzeba uzmiennić r0 po przez pomnorzenie przez N, wtedy wzór na energię przybiera postać

a na siłę jądrową
 Widać wyraźnie, że siła zależy od odwrotności promienia w trzeciej potędze. To daje olbrzymie różnice między siłą Kulombowską i jądrową ta ostatnia dla małych R jest dużo większa a dla dużych dużo większa.
Widać wyraźnie, że siła zależy od odwrotności promienia w trzeciej potędze. To daje olbrzymie różnice między siłą Kulombowską i jądrową ta ostatnia dla małych R jest dużo większa a dla dużych dużo większa.
Rozróżniamy następujące typy operatorów



Operator Nabla daje współrzędne wektora a Laplasjan długość wektora. Łatwo to udowodnić stosując rachunek wektorów, który znajdziecie w tym blogu.

Następnymi bardzo ważnymi operacjami na tych operatorach jest
Rotacja z dywergencji
Dywergencja z dywergencji czyli przenikanie jest iloczynem skalarnym dwóch operatorów Nabla a rotacja iloczynem wektorowym dywergencji. Teraz dwa ważne prawa
I
Rotacja z dywergencji równa się zero

Udowadniamy tą zależność rachunkiem tensorowym, który znajdziecie w tym blogu- Rachunek tensorowy.
II
Dywergencja z rotacji równa się zeru.

Wzór na rotację, który wyprowadzamy z rachunku tensorowego znajdziecie w artykule - Równania Maxwella podstawą teorii pola. Dipol elektryczny. Natężenie pola elektrycznego w odległości r od dipola. Zasada działania radia

policzymy tutaj natężenie pola elektrycznego E w odległości R od niego w punkcie P.Dipol drgający został umieszczony w postaci naładowanego pręta w kartezjańskim układzie współrzędnych wzdłuż osi Z. Korzystamy z zależności

Tutaj potencjał oznaczyliśmy po przez symbol fi, może bardziej szczęśliwe było by oznaczenie klasyczne U. Calka z pola eletrycznego jest potencjałem, więc skoro pochodna jest odwrotnością całki więc pochodna potencjału U daje pole elektryczne E.
Należy teraz określić potencjał pola elektrycznego fi w punkcie P. Tutaj zadanie jest proste gdyż potencjał ten jest różnicą potencjałów wynikających z odległości r1 = [0,0,-d/2] i r2 = [0,0,d/2], są to współrzędne r1 i r2. Innymi słowy to środek pręta znajduje się w układzie współrzędnych uczyniliśmy tak po to by zapewnić symetrię.

Kąt teta pokazany na rysunko jest kątem między osią Z a płaszczyzną X,Y.. Na tej płaszczyźnie został umieszczony środek dipola.. Wobec tego wypadkowy potencjał w punkcie P wynosi

Dla dużych odległości od dipola wielkość d^2/(4*r^2) jest tak mała, że możemy ją pominąć. Wyrażenie pod pierwiastkiem przybiera więc postać

Wobec tego wzór na wypadkowy potencjał w punkcie P przybiera postać

Następnie stosujemy przybliżenie pierwsze równanie na poniższym zdjęciu

Dla durzych r znowu człon w nawiasie możemy pominąć, więc ostatecznie wzór na potencjał w punkcie P, przybiera postać

Gdzie
P = Q*d _ moment dipolowy
d- rozmiar dipola
Q ładunek na dipolu
ponieważ Z/r = cos(teta), więc potencjał w punkcie P określony za pomocą r i teta ma postać

Pole elektryczne w odległości P od drgającego dipola
Chcąc policzyć pole elektryczne w punkcie P wracamy do wzoru określającego zależność pola elektrycznego od pochodnej potencjału. Parę zdjęć wyżej

Jest to wzór określający natężenie pola elektrycznego E w podległości r od drgającego dipola wyrażony za pomocą r - odległości i kąta teta
Chcąc policzyć pole elektryczne na osiach x,y,z wracamy do równania w postaci



Dla składowej Ez wykorzystaliśmy wzór na pochodną iloczynu dwóch funkcji>
Należy pamiętać, że te wzory są słuszne dla dużych r w porównaniu z rozmiarami dipola d. To koniec zadania , jak te wiadomości wykorzystać
Załużmy, że znamy odległość nadajnika radioewego i znamy też wzór określający zmianę pola elektrycznego, może to być przykładoeo
E = E0*cos(omega*T)
Wracamy teraz do równania Maxwela , znajdziecie je w tym blogu

Wzór na rotację też podaliśmy w tym blogu>
Licząc rotację a później całkując po czasie T powyższe równanie na E można policzyć pole B a następnie korzystając z prawa Ampera można policzyć natężenie prądu , który wyindukuje się w cewce radiowej

L - długość przewodnika cewki radiowej
Znając tą wartość można skonstruować wzmacniacz, który pozwoli nam słuchać audycji radiowych.
Prawo Biota-Savarta
W artykule Dipol elektryczny wyprowadziliśmy wzór na natężenie pola elektrycznego w odległości r od przewodnika. Przypomnimy ten wzór

Podstawiając za Q - ładunek wartość taką jak pokazaliśmy poniżej i obnirzając potęgę o jeden - to konieczność gdyż pole magnetyczne zależy od odwrotności odległości od źródła, otrzymamy

Otrzymujemy wzór na pole magnetyczne B w odległości r od przewodnika. Związek między ładunkiem a natężeniem prądu jest aksjomatem więc trzeba się tego nauczyć na pamięć. Pamiętajmy, że pole elektryczne E opisują ładunki Q a pole magnetyczne B natężenia prądów I. Zamieniając je tak jak pokazaliśmy wyżej otrzymujemy od razu wzory na pola odpowiednio E i B. Ponieważ dodaliśmy wielkość o wymiarze 1[m], wersor choć jednostkowy to jednak ma wymiar musimy podnieść r o jedną potęgę, to samo z polem elektrycznym.

Przechodząc do bardzo małych zmian i rozmiar dipola d zamieniając na bardzo małą zmianę przewodnika dL otrzymamy

Dalej z rachunku iloczynów wektorowych wiemy, że

Dodając więc wersor r pozbędziemy się sinusa, w ten sposób otrzymamy prawo Biota - Savarta w książkowej postaci.

Równanie falowe Równania Maxwela
Równanie takie wyprowadza się z równań Maxwela, na początek weźmy dwa z nich w postaci różniczkowej

Wprowadzimy pole A takie, że

Jest ono dowolne, a jedynym warunkiem jest to by jego całka równała się B. Z pierwszego równania otrzymujemy

Dla sumy takich pól możemy wprowadzić stały potencjał skalarny fi. Ponieważ mamy poprawej stronie równania zero więc korzystamy z rachunku pochodnych - Pochodna ze stałej równa się zero. Otrzymujemy w ten sposób





Dla jasności dodamy, że

Rachunek tensorów, bo z nim mamy do czynienia znajdziecie w tym blogu.
Przykład z propagacją fali dźwiękowej w ośrodku sprężystym. Prędkość rozchodzenia się fali

jest pochodną po współrzędnych liniowych. Wiedząc to rozpatrzmy falę rozchodzącą się wzdłuż osi x, równolegle do podłoża. Założymy jeszcze dla uproszczenia rachunków, że źródło fali znika po zadziałaniu a prpagacja fali zachodzi bez strat energetycznych. Rozpatrujemy wtedy równanie typu.

W danym ośrodku prędkość fali jest stała więc mamy równanie różniczkowe zerowego rzędu. Załużmy teraz ,że falę opisuje wzór, jest zgodny z rzeczywistością.

Niech teraz k będzie przedstawione jak na zdjęciu poniżej, sinusy i kosinusy zostały pominięte jako bardzo małe. Wyliczając pochodne względem x i t otrzymujemy



Zależność masy fali od masy ośrodka ciężko nam ująć we wzór zostawiamy to tęższym głową. Gęstość fali to masa tej fali zawarta w jej 1/2 długości lambda
Wyszła nam zależność odwrotnie proporcjonalna do gęstości a powinno być na odwrót, im większa gęstość tym większ prędkość fali. Można to łatwo skorygować, widać z powyższych równań, że prędkość fali jest odwrotnie proporcjonalna do k, należy przyjąć k takie jak na poniższym zdjęciu wtedy prędkość fali stanie się wprost prporcjonalna do gęstości
To teraz poprawna zależność Jednak pokusimy się o wyprowadzenie głębszej zależności. Gęstość fali to stosunek jej masy do zawsze stałej objętości tej fali. Masa zawarta w połówce fali w całości jest równa masie ośrodka, choć sama masa zmienia się jak cosinus alfa. Więc wzór na prędkość fali przybiera postać

Dla ciał stałych skorzystamy z zależności energii od ciśnienia

Ogólnie wzór na prędkość przybiera postać

w ciałach stałych energia fali wynikająca z ciśnienia i objętości , musi być równa energii elektrostatycznej, którą wytwarzają elektrony krążące na końcowych orbitach atomowych tworzące wiązania sieci krystalicznej. W tym przypadku Q jest ładunkiem elektronów a N jest liczbą elektronów brakujących do całkowitego obsadzenia orbity

Liczba 8 wzieła się z podstawienia za lambda , 1/2*lambda. jedna druga podniesiona do potęgi trzeciej daje jedną ósmą.
n - jest liczbą moli ciała stałego
k - jest stałą Boltzmana
T - jest temperaturą ciała stałego
k0 - stałą elektryczną
r.at-jest promieniem atomu do pierwszej nieobsadzonej do końca orbity
Dla cieczy sprawa jest prosta. Podstawiamy ciśnienie baryczne

Gdzie
q - gęstość cieczy lub gazu
g - przyśpieszenie planetarne
h - wysokość słupa cieczy
n - jest liczbą moli
k - jest stałą Boltzmana
T - jest temperaturą
Dla gazów należy podstawić P zmieniające się wraz z wysokością, łatwo znajdziecie je w internecie. Liczbę moli n liczymy ze wzoru

Gdzie
M.oś - masa ośrodka w którym rozchodzi się fala
m.at. - masa atomu wchodzącego w skład ośrodka
Długość fali do trzeciej potęgi daje objętość, która pomnożona przez gęstość ośrodka daje masę fali, zaś masa fali równa jest masie ośrodka. Otrzymujemy więc wzór

m - masa ośrodka w którym rozchodzi się fala.
Jest to nasze rozwiązanie być może niezbyt eleganckie gdyż wchodzi w nie długość fali. Istnieją rozwiązania pomijające tą wielkość
Prędkość i praca cząstek w gazach

Obliczamy ciśnienie wywierane przez cząstki na ścianki naczynia. Ponieważ cząski poruszają się chaotycznie, więc 1/3 cząstek będzie uderzała o każdą z par ścianek sześcianu. Cząstka zderzając się sprężyście dozna zmiany pędu
Zmiana pędu ciała jest równa pędowi siły


Otrzymujemy więc układ równań





P*V = n*R*T
gdzie
n- liczba moli gazu
V-Objętość naczynia
T - Temperatura gazu
R - Stała Rytberga = 8,31 [J/stopień] Praca wykonana nad gazem
Przenosząc objętość na lewą stronę równania otrzymujemy zależność
P*V = E(k.śr)
Ponieważ energia jest równoważna pracy więc
Policzymy pracę dla premiany izobarycznej to znaczy takiej gdzie ciśnienie jest stałe a zmieniamy objętość. Oznacza to, że otoczenie doskonale odbiera temperaturę z naczynia z gazem, to znaczy temperatura też stała, tylko wtedy spełniony jest warunek stałości ciśnienia
Ponieważ zmieniamy objętość więc poniższe równanie całkujemy po objętości. Konieczna jest znajomość racunku całkowego oraz rachunku logarytmów. Wszystko to znajdziecie w tym blogu.




Pracę na jeden mol gazu otrzymamy dzieląc powyższe równanie przez n

Zapomnieliśmy dodać stałą całkową C. Z warunków początkowych otrzymujemy V1=V2, gdyż na początku nie wykonano pracy.

Budowa i zasada działania transformatoraj

Transformator składa się z dwóch uzwojeń, pierwotnego Z1 i wtórnego Z2, Połączonych frromanetykiem, który spełnia rolę przewodnika pola magnetycznego B. Przepływ prądu zmiennego w cewce Z1 powoduje indukcję pola magnetycznego, które jest przewodzone przez ferromagnetyk, innymi słowy ferromagnetyk drga tym wyindukowanym polem magnetycznym. Ponieważ drga cały więc te drgania w cewce Z2 powodują indukcję prądu o natężeniu I2. Indukcję prądu przez zmienny prąd opisaliśmy tutaj
http://jakpowstajfraktale.blogspot.com/2012/03/prawa-naturalne-fizyka-w-piguce-dla.html

Załóżmy teraz, że ustalamy długość przewodnika cewki a zmieniamy tylko pole powierzchni, Zauważmy przy tym, że pole powieżchni delta s razy długość przewodnika daje objętość przewodnika. By nie doszło do rezonansu w kondensatorze, móże być on konstruktywny bąź destruktywny, ustala się taką samą objętość dwóch cewek po przez odpowiedni dobór średnicy przewodnika, zyskuje się tym sposobem różnicę w ilości uzwojeń n. Rozwiązując powyższy układ równań względem I oraz pamiętając, że objętości dwóch cewek są sobie równe oraz czasy delta t drgań są takie same otrzymujemy

Dzieląc I1 i I1 przez siebie otrzymujemy klasyczny wzór zwany przełożeniem transformatora. Przez pomyłkę pomineliśmy delta t na powyższym zdjęciu, jednak skoro są równe to i tak się skracają

Wyprowadzenie prawa Ampera - Prawo Ampera

Prąd o gęstości j płynie przez przewodnik wzdłuż osi Z. Związek między gęstością a natężeniem prądu został pokazany na poniższym zdjęciu. Jest to prawo aksjomatyczne trzeba zrozumieć i zapamiętać.

Korzystamy z pierwszego równania Maxwella

Całka i operator różniczkowy dywergencji znoszą się, gdyż całkowanie jest odwrotnością różniczkowania, nie wolno tak robić w przypadku rotacji. Otrzmujemy więc równanie na natęrzenie pola elektrycznego E

Po uwzględnieniu wzoru na Q otrzymujemy

Drugie równanie na zdjęciu pokazuje związek między potencjałem i polem elektrycznym E. Później zrozumiecie po co liczymy tą wielkość. Dalej mamy

W artykule- Równanie falowe i prawa maxwela - wprowadziliśmy pole A którego rotacja daje pole magnetyczne

Tutaj wyprowadzone pole fi jest właśnie odpowiednikiem pola A i stanowi jego potencjał tak jak V jest potencjałem pola elektrycznego E. Jest to bardzo warzny wzór, nauczciesię dobre sposobu wyprowadzenia, Tak więc pole magnetyczne B jest rotacją pola potencjalnego fi.

Przypomnimy tutaj operator rotacji, Oprator rotacji od dywergencji różni się tylko iloczynami, pierwszy jest iloczynem skalarnym drugi iloczynem wektorowym, to daje olbrzymią różnicę. Wzór na rotację otrzymuje się z rachunku tensorowego, który znajdziecie w naszym blogu, wzory na dywergencje i rotację pola podaliśmy terz w artykule- Równania Maxwella podstawą teorii pola- Też znajduje się w tym blogu< oto wzór na rotację

We wzorze tym na przykład f(z) - oznacza, że składową zetową pomijamy we wzora, pozostaje tylko x i y.
Ponieważ prąd płynie tylko po składowej Z Więc niezerowe rozwiązanie istnieje tylko dla składowej fi(z), wszystkie inne sięzerują pokazaliśmy to na poniższym zdjęciy. Pamiętajmy , że ze wzoru na
r^2= x^2+y^2+z^2
składową z^2 odrzucamyzostaje więc pocodna po y i po x tylko z równania
r^2 = x^2+ y^2


Korzystając z twierdzenia logarytmów 1/2 wynosimy przed logarytm i stosujemy wzór na pochodną funkcji złożonej. Mając składowe Bx, By,, Bz, korzystamy z twierdzenia Pitagorasa, które da nam wypadkowy wektor B pola magnetycznego


Przenosząc L na lewą stronę równania i przechodząc z l na d(L), otrzymamy klasyczne prawo Ampera w postaci całkowej

d(L) - jest dowolną krzywą przedstawioną dowolnym wzorem, może być to po prostu L lub np. L*ln(L)
Zauważmy, że przenikalność próżni razy prędkość światła do kwadratu daje przenikalność magnetyczną próżni, ściślej jej odwrotność. Jeżeli przeniesiemy 2*pi na lewą stronę wtedy otrzymamy całkę obrotową, która jest ostateczną postacią prawa Ampera

Pierwsze i drugie prawo Keplera
I prawo Keplera
Ruch planet odbywa się po torach eliptycznych, gzie w jednym z ognisk elipsy leży Słońce.
II prawo Keplera
Promień wodzący planety zakreśla w równych odstępach czasu równe pola. Inaczej mówiąc prędkość polowa planet jest stała.
Dowód drugiego prawa Keplera
Prędkość polowa będzie zmianą pola zakreślonego przez planetę do czasu w którym to ple zostało zakreślone. Rysujemy wykres i układamy mikro równanie

Ponieważ jak widać na poniższym zdjęciu chodzi nam o dS, więc wielkość tą wyciągamy spod całki.

Skorzystamy teraz z prawa zasady zachowania momentu pędu L


Widać, że prędkość polowa zależy tylko od momentu pędu L, który jest stały, więc i prędkość polowa jest stała, co należało udowodnić
Dynamika relatywistyczna - Wyprowadzenie wzoru na przyśpieszenie relatywistyczne
W dynamice relatywistycznej często występuje wielkość, nadano jej osobny symbol

I tak droga, czas i masa transformują się według wzorów, im v bliższe prędkości światła c tym wyraźniejsze efekty relatywistyczne

Więcej na ten temat znajdziecie w tym blogu
Żeby określić przyśpieszenie relatywistyczne posłużymy się wzorem

Ponieważ gamma zależy od prędkości więc stosujemy wór na pochodną iloczynu funkcji

Dalej przyglądnijmy się członowi tego równania
Dalej pomnożymy ten człon i podzielimy przez prędkość światła do kwadratu


Dalej łączymy obydwa człony

Podzielimy teraz obydwie strony równania przez m otrzymując w ten sposób przyśpieszenie relatywistyczne

Energiia relatywistyczna - Wyprowadzenie wzoru
By określić energię relatywistyczną rozpatrzmy równanie zmiany tej energii w czasie. Łatwo sprawdzić, że pochodna energii po czasie równa się sile pomnożonej przez prędkość.

Wyliczamy d(E) po przez rozdzielenie zmiennych

Stosujemy teraz wzór na całkę iloczynu dwóch funkcji, łatwo znajdziecie go w internecie. Wgląda to następująco

Czasy skróciły się więc całkujemy po prędkości.Całka ta daje energię kinetyczną, zapiszmy ją w postaci energii całkowitej a jej wartość będzie zależna od zmiany gama a ściślej wchodzącej w jej skład wielkości beta


Skorzystamy teraz z twierdzenia Pitagorasa, współrzędne skalara energii podniesione do kwadratu dadzą wypadkowy skalar.

Otrzymaliśmy wzór na energię relatywistyczną, a wzór na pęd relatywistyczny otrzymamy rozwiązując pierwsze równanie względem P.

Są to wzory różniące się od oficjalnie przyjętych. Czy są poprawne tego nie wiemy. Proponujemy tę nieścisłość wyjaśnić na wykładach.
Wyprowadzeniewzorów na liczbę zderzonych cząstek, Kąt bryłowy rozproszenia cząstek, Przekrój czynny na zderzenie cząstek - Przeszkody. Przekrój czynny Rutherforda
Liczba zderzonych cząstek w przeszkodzie
Prawdopodobieństwo zderzenia cząstki z atomem przszkody jest określony aksjomatycznie w postaci

Następnie wprowadzimy pojęcie średniej drogi swobodnej cząstek w przeszkodzie którą przebędzie cząstka w przeszkodzie zanim dojdzie do jej zderzenia z atomem przeszkody

Przenosząc na prawą stronę fi zero i uwzględniając wzór na średnią drogę swobodną otrzymujemy

Liczba zderzonych cząstek N jest równa różnicy strumienia cząstek przed przeszkodą i za przeszkodą

Z definicji aksjomatyczej średniej drogi swobodnej otrzymujemy


Wyprowadzenie wzoru na kont bryłowy prawdopodobieństwa rozproszenia zderzonych cząstek w przeszkodzie.

Prawdopodobieństwo rozproszenia w kąt bryłowy omega jes aksjomatycznie określony następująco


Wyprowadzenie wzoru na przekrój czynny atomów przeszkody
Można też kąt bryłowy prawdopodobieństwa zdefiniować następująco

Stąd zmiana przekroju czynnego wynosi

Dalej należy określić przekrój czynny zależny od strumienia fi i prędkości cząstek padających na przeszkodę. Można wykorzystać w tym celu wcześniej wyprowadzony wzór na liczbę N zderzonych cząstek, jednak możemy rozpatrzyć problem bardziej dokładnie. W tym celu zastosujemy zasadę zachowania momentu pędu rozproszonych cząstek i wprowadzimy promień b zwany parametrem zderzenia, Wystarczy spojrzeć na pierwszy rysunek i zamiast R dopisać sobie b , który będzie się zmieniał w zależności od gęstości strumienia cząstek padających na przeszkodę i w zależności od ich prędkości.




Zmianę liczby zderzonych cząstek w zależności od ich prędkości możemy określić w następujący sposób



W ten sposób otrzymaliśmy wzór na przekrój czynny zależny od gęstości strumienia cząstek padających na przeszkodę wyrażony za pomocą prędkości tych cząstek, Inaczej wany Przekrojem czynny Rutheforda
Fizyka jądrowa. Wyprowadzenie wzoru na liczbę stanów kwantowych, pęd i energię i siłę jądrową- jądra atomowego.
Znajdziemy tutaj wzory na liczbę stanów kwantowych, pęd i energię- jądra atomowego w zależności od liczby N nuklidów - protonów i neutronów- i promienia R tego jądra.
Jak wiemy z elektrostatyki dwa jednakowe ładunki odpychają się, jednak gdy zbliżyć je do siebie na odpowiednią odległość, wtedy do głosu dochodzą silniejsze siły przyciągające, zwane siłami jądrowymi. Jej energia jak się dalej przekonamy, zależy tak jak dla ładunków odwrotnie od promienia jądra, jednak zamiast ładunku istnieje masa protonu w mianowniku, co determinuje ogromną energię wiązań jądrowych..
Wraz ze wzrostem promienia jądra, energia ta maleje gdyż masa nukleonu jest ustalona. Tym samym sytuacja jest niemal odwrotna niż w elektrostatyce, w niej ładunki się sumują a suma ta jest podniesiona do kwadratu gdy chodzi o energie i siły. Skutkiem tego siły jądrowe choć o wiele wiele potężniejsze od elektrostatycznych, mają bardzo krutki zasięg.
Wyprowadźmy teraz wzór na tą energię. W tym celu wykożystamy postulat Bohra

gdzie n jest kwantem, liczbą całkowitą o którą mogą zmieniać się momenty pędów elektronów krążących po orbitach atomowych. założymy teraz, że w jądrach atomowych jest tak samo, czyli liczba możliwych pędów neutronów i protonów w jądrze jest też skwantowana..
Dalej będziemy rozpatrywać objętość przestrzeni pędów i wielkości liniowych, to konieczne, gdyż całkowita liczba możliwych pędów tworzy pewną przestrzeń. W tym celu równanie Bohra podniesiemy do trzeciej potęgi.

n - niepodnosimy do trzeciej potęgi, gdyż liczba możliwych stanów w przestrzeni jest dalej n.
h^3 - daje sześciowymiarową przestrzeń we współrzędnych, Px,Py,Pz i w przestrzeni liniowej, x,y,z.Stąd łatwo wyliczyć n - możliwą liczbę stanów jądra.

Dalej z zasady Pauliego wiemy, że jeden stan mogą obsadzić dwa nuklidy o przeciwnych stanach, powyższy wzór przedstawia taką sytuację, więc dzieląc ten wzór przez 2 otrzymamy ilość protonów i neutronów w jądrze.


Jest to wzór na pęd w zależności od liczby protonów i neutronów w jądrze. Dalej zauważymy, że

gdzie r0 - promień protonu lub neutronu. Podstawiajć to otrzymujemy
Podstawiając ten pęd do wzoru na energię mamy dalej końcowy wzór

Pamiętajmy, że pochodna energii po drodze daje siłę, tutaj trzeba policzyć pochodną po d(r) i d(N) W tym celu trzeba uzmiennić r0 po przez pomnorzenie przez N, wtedy wzór na energię przybiera postać

a na siłę jądrową

http://jakpowstajfraktale.blogspot.com/